In Figure 3, we can see that KBS are mainly synthetic theories of cognitive processes.
KBS have not been able to model successfully adaptive behaviour (Maes, 1993; Clark, 1997).
BBS are mainly synthetic theories of adaptive behaviour. At this moment, it has not been
possible to model cognitive processes from BBS, but it seems that this, once achieved, would
allow to simulate all ranges of human intelligence: from adaptive behaviour to cognitive
processes (Castelfranchi, 1998). This is because such a system would evolve in a similar way to
the way our capability for thought has. One way to achieve this would be by learning patterns
from behaviour. After learning patterns, concepts would have to be learned, in order to learn
a language. This can only be made in a society, because an individual can perceive himself only
in his similars. After the language, a logic should be learned (abstracted) from the language.
All this processes should be emergent. Once at a logic level, cognitive processes should be
successfully reproduced. We would have a behaviour-based cognitive emergence.
Theory Prediction > Predictedfacts
Observed facts Observed facts
Figure 4. The inductive method tests a theory of
a system by matching predicted facts against
observed facts (Steels, 1995).
Observed
phenomena
Observed
performance
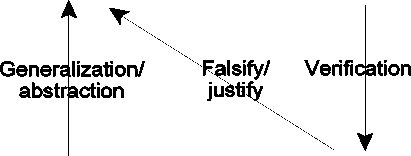
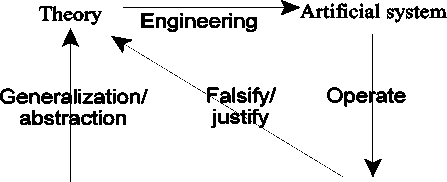
Figure 5. The synthetic method builds up theories
of a system attempting to construct an artificial
system that exhibits the same capabilities of the
natural system (Steels, 1995).
KBS are also known as “top-down” systems (Maes, 1993), because they are (in most
cases) designed and constructed from the whole to the parts. This means that from the
beginning of the development, we should have a complete idea of what the system should do.
The problem domain should be defined and limited. The control is (usually) centralized. BBS
are also known as “bottom-up” systems (Maes, 1993), because they are designed and
constructed from interacting parts (usually autonomous agents5) that together make the system
functional (also in most cases). This approach allows an incremental development of the
system, and also a “graceful” and robust degradation when some parts of the system fail, or are
removed. This also allows BBS to respond to open, incomplete, or unknown problem domains,
allowing flexibility in the case of unexpected events. In BBS the control is (usually) distributed.
A useful comparison between the advantages and disadvantages of KBS and BBS was made by
Maes (1993).
5We give a notion of the concept of “agent” in Section 1.2.
11
More intriguing information
1. The name is absent2. IMMIGRATION AND AGRICULTURAL LABOR POLICIES
3. NVESTIGATING LEXICAL ACQUISITION PATTERNS: CONTEXT AND COGNITION
4. The name is absent
5. The name is absent
6. Cyber-pharmacies and emerging concerns on marketing drugs Online
7. The name is absent
8. Governance Control Mechanisms in Portuguese Agricultural Credit Cooperatives
9. Declining Discount Rates: Evidence from the UK
10. A model-free approach to delta hedging