CHAPTER 5. SIMULATION RESULTS
62
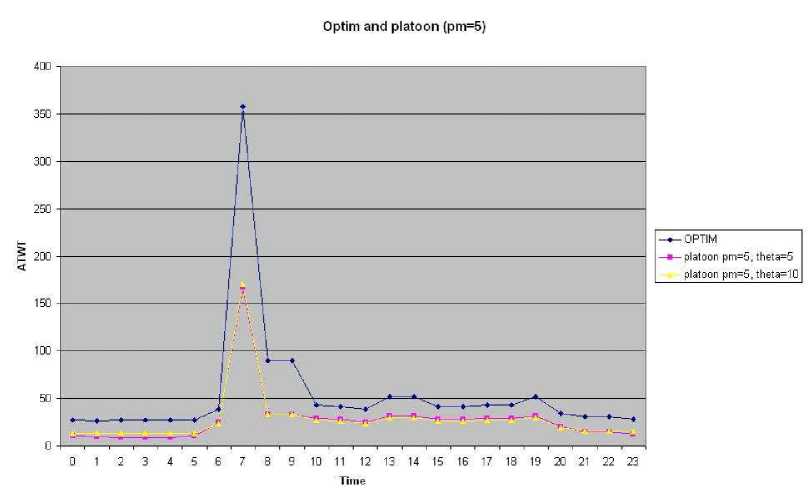
Figure 5.26: Wetstraat, optim controller and platoon Controllerwith φmin = 5 and
θ = 5;10
users is waiting in front of a red light, all the road users can cross the junction
when it gets green and after the last road user has crossed the junction, the traf-
fic light at the other direction can request green, which it gets immediately when
cars are approaching the traffic light. In this way the traffic light controller keeps
platoons together. However, when θ is set to 5 and φmin to 1, then the second con-
dition of the controller will cause problems. Requests for green light are allowed
very fast when those parameters are used. When the cars get green, they have not
enough time to get away to reduce the density of cars in front of the traffic lights.
When the controller counts more than μ cars, other requests are granted. In this
way the light switches very fast and the traffic cannot flow through fast enough.
For high density (Wetstraat at 7am) the Wetstraat has all its traffic lights turned
green for most of the time. On the side-roads few cars are approaching the red
light and a queue of road users is growing slow. When the θ has been reached and
there is no platoon crossing, the side-road gets green and all the waiting cars are
entering the Wetstraat. After the last car has crossed the junction, the Wetstraat
gets green again. Because of the high traffic density, platoons are not visible.
More intriguing information
1. The Shepherd Sinfonia2. O funcionalismo de Sellars: uma pesquisa histδrica
3. Does Presenting Patients’ BMI Increase Documentation of Obesity?
4. Une nouvelle vision de l'économie (The knowledge society: a new approach of the economy)
5. Placentophagia in Nonpregnant Nulliparous Mice: A Genetic Investigation1
6. The name is absent
7. Shifting Identities and Blurring Boundaries: The Emergence of Third Space Professionals in UK Higher Education
8. The name is absent
9. Ability grouping in the secondary school: attitudes of teachers of practically based subjects
10. The name is absent