(b) (c) (d)
(e)
(f)
Figure 1.3 : Two-dimensional comparison of methods, (a) is a multi-material voxel
with no intensity information, (b) is the naive approach of classifying by nearest
neighbor, (c) Tiede et al. proposes a linear filter for classification [27], but it leaves
points unclassified, (d) We propose a tri-linear representation that classifies all points
within a voxel, (e) and (f) are examples of our approach that demonstrate the flexi-
bility in representing contours.
(a)
(c)
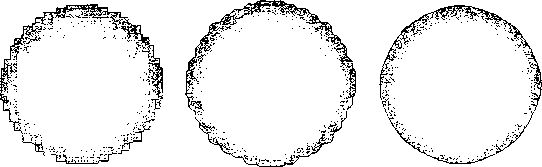
Figure 1.4 : Three-dimensional comparison of methods, (a) is the input of a sphere-
like segment, (b) is rendered using Tiede et al.’s classification scheme [27]. Note
that it produces a bumpy surface, (c) is our representation for the segment contour.
Details for constructing (c) from the segment (a) is described in Section 3.4.
volume rendering [8]. The classification scheme described by Tiede et al. focuses on
segments produced by thresholding. In the case where the threshold ranges of mul-
tiple materials overlap, Tiede et al.’s approach is to linearly interpolate the binary
mask associated with the material. For each material A, space where the interpolated
value (with respect to A’s tri-linearly interpolated binary mask) is greater than 0.5
is classified as A. Although linear filtering resolves the overlap of threshold ranges, it
also produces unclassified regions within a single voxel (see Figure 1.3(c)). In the case
where the input is a segmented volume without intensity information, Tiede et al’s
More intriguing information
1. The name is absent2. Forecasting Financial Crises and Contagion in Asia using Dynamic Factor Analysis
3. Wirkung einer Feiertagsbereinigung des Länderfinanzausgleichs: eine empirische Analyse des deutschen Finanzausgleichs
4. NEW DEVELOPMENTS IN FARM PRICE AND INCOME POLICY PROGRAMS: PART I. SITUATION AND PROBLEM
5. Wirkt eine Preisregulierung nur auf den Preis?: Anmerkungen zu den Wirkungen einer Preisregulierung auf das Werbevolumen
6. The name is absent
7. The name is absent
8. Palkkaneuvottelut ja työmarkkinat Pohjoismaissa ja Euroopassa
9. The name is absent
10. TINKERING WITH VALUATION ESTIMATES: IS THERE A FUTURE FOR WILLINGNESS TO ACCEPT MEASURES?