around the virtual world, and to select and place virtual objects within that
world, as described previously. A head tracker was specially adjusted on a
cap that was worn by the participant, thus relaying the head position and
orientation to the computer (Figure 5). Before starting, the task was explained
to the participant who had a chance to practice navigating and moving objects
around in the virtual space of a training environment.
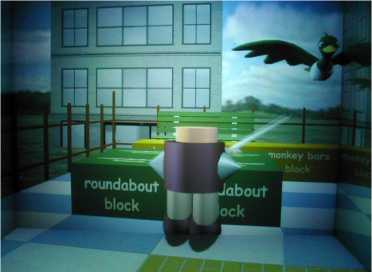
Figure 6. A robot character called “Spike” was used in the passive VR condition to play
back a pre-recorded sequence of actions.

The second condition, the “passive VR” experience, took place in the same
immersive environment; only, in this case, a pre-recorded sequence of actions
involving the re-design of the playground was played out by a virtual
character, a robot called “Spike” (Figure 6). The participant stood in the space
wearing the stereoglasses and observed Spike as he went about listening to
the rules and moving the blocks around as in a video sequence. The
participant was encouraged to predict what Spike’s actions would be (“what
would you do if you were Spike?”) and explain why Spike had done what he
had done after each playground element was corrected.
Finally, if assigned to the non-VR condition, the participant took part in an
activity using LEGO bricks (Figure 7). The activity involved the design of a
playground on a grid-like floor plan, similar to seeing the playground from
above in the virtual reality environment. As in the Virtual Playground, the
differently coloured bricks represent the swings, slides, etc., which the
participant must position according to the rules provided on cards. However,
although each participant was actively involved in designing the playground,
no response or feedback from the system existed.
15
More intriguing information
1. Short report "About a rare cause of primary hyperparathyroidism"2. The name is absent
3. Should informal sector be subsidised?
4. Commitment devices, opportunity windows, and institution building in Central Asia
5. The name is absent
6. SOME ISSUES CONCERNING SPECIFICATION AND INTERPRETATION OF OUTDOOR RECREATION DEMAND MODELS
7. TOMOGRAPHIC IMAGE RECONSTRUCTION OF FAN-BEAM PROJECTIONS WITH EQUIDISTANT DETECTORS USING PARTIALLY CONNECTED NEURAL NETWORKS
8. Forecasting Financial Crises and Contagion in Asia using Dynamic Factor Analysis
9. A dynamic approach to the tendency of industries to cluster
10. Qualifying Recital: Lisa Carol Hardaway, flute