Examples of works related to behaviour virtual laboratories are the Simulated
Environment developed by Tyrrell (Tyrrell, 1993), which tests different proposed action
selection mechanisms; and Beer's Simulation of Cockroach Locomotion and Escape (Beer and
Chiel, 1993), which allows to lesion different neuronal structures of the insect.
Following these ideas, we developed a Behaviours Virtual Laboratory, in which animats
and simple animat societies can be simulated, having in mind three goals: First, to test and
analyse the properties of the Behavioural Columns Architecture (BeCA) (Gonzalez, 2000).
Second, to test an analyse our Imitation and Induction (I&I) model for social action. And
finally, to provide a useful tool for biologists, sociologist, and roboticists to experiment with the
adaptive and social behaviours that BeCA and I&I, respectively, are able to simulate.
5.2. The Virtual Environment
“The environment is not best conceived solely as a problem domain to be negotiated.
It is equally, and crucially, a resource to be factored in the solutions.”
—Andy Clark
The virtual environment is defined by a plane (z, x) of a space (x, y, z), limited by a
frame. In the area defined by this frame different objects can be created. These objects
represent the following external stimuli: food (green spheres), water (blue circles), grass
(texturized green circles), fixed obstacles (brown parallelepipeds), blobs (black ellipsoids), and
other kinds of stimuli that initially have no specific meaning for the entity (red and yellow
circles). The frame that defines the plane (z, x) is also considered as a fixed obstacle. The
animats perceive these stimuli, and act upon them. Figure 19 and Figure 20 show aerial views
of the simulated environment.
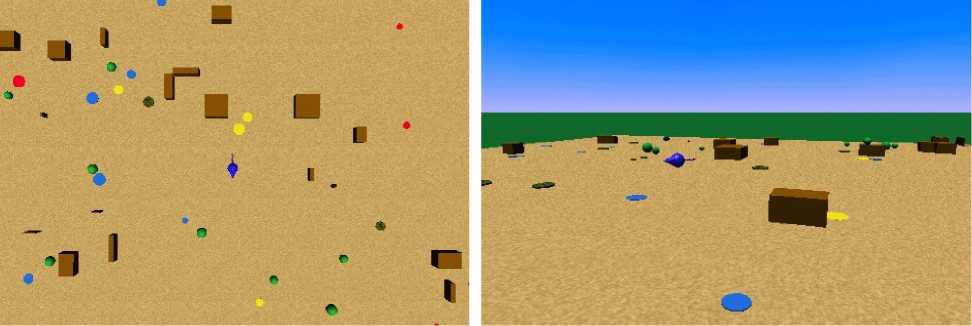
Figure 19. An environment seen from the top. Figure 20. Another perspective of an environment.
63
More intriguing information
1. Implementation of Rule Based Algorithm for Sandhi-Vicheda Of Compound Hindi Words2. RETAIL SALES: DO THEY MEAN REDUCED EXPENDITURES? GERMAN GROCERY EVIDENCE
3. Placentophagia in Nonpregnant Nulliparous Mice: A Genetic Investigation1
4. The name is absent
5. Backpropagation Artificial Neural Network To Detect Hyperthermic Seizures In Rats
6. The Trade Effects of MERCOSUR and The Andean Community on U.S. Cotton Exports to CBI countries
7. Two-Part Tax Controls for Forest Density and Rotation Time
8. The name is absent
9. Innovation Policy and the Economy, Volume 11
10. Does Market Concentration Promote or Reduce New Product Introductions? Evidence from US Food Industry