Actions
Potential
Actions
DriveZPerception
Congruents
Consuniniatory
Preferents
Perceptual
Persistents
External
Perceptions
lunger
Explore/ Approach
Eat
Wander
food
Explore/ Approach
Wander
food
Explore/ Approach
Wander
food
Default
Avoid
obstacle
Food Food at Red spot Obstacle
perceived range perceived '" at range
Food Food at Red spot
perceived range perceived
τ, . Redspot
Eat ∙ j
perceived
τ, . Red spot
Eat perceived
Unconditioned Neutral Reflex
stimuli stimuli stimuli
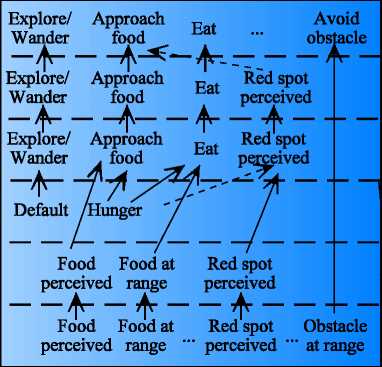
Figure 23. Signal trajectories in BeCA implemented as the BPS of an animat.
Drive
InteroZExteroZDrive
Congruents
External
Perceptions
Internal
Perceptions
5.3.6. I&I in the animats
The imitation and induction (I&I) model presented in Section 4.1 is used by the animats
to communicate and socialize by imitating and inducing their behaviours.
For example, if animat Paco is hungry, and he is perceiving no food sources, but he is
perceiving animat Pepe executing the behaviour “approach food”, he will imitate him by
approaching to Pepe. Once he perceives the food source Pepe was approaching to, he will
approach to it. Induction occurs in a similar way.
5.4. The Interface
The interface of the BVL allows to perform a wide variety of simulations and
experiments. It consists of one window containing the general controls of the BVL and one
window for each animat created in the BVL, as the ones shown in Figure 24 and Figure 25.
The general controls window allow the user to save, load, and reset animats,
environments, and simulations. Animats are saved with all their properties (internal states,
learning states, parameters, and attributes). Simulations handle animats and environments as
one. This allows to save initial, partial, or final states of experiments easily. In this window, the
user can add and remove external stimuli, randomly or with specific positions and magnitudes;
pause and resume the simulation; adjust the refresh rate of the graphics (time steps / step
painted); and set a delay for each simulation interval in milliseconds.
68
More intriguing information
1. The name is absent2. The name is absent
3. The WTO and the Cartagena Protocol: International Policy Coordination or Conflict?
4. Dual Inflation Under the Currency Board: The Challenges of Bulgarian EU Accession
5. The name is absent
6. Effects of a Sport Education Intervention on Students’ Motivational Responses in Physical Education
7. Visual Artists Between Cultural Demand and Economic Subsistence. Empirical Findings From Berlin.
8. IMMIGRATION AND AGRICULTURAL LABOR POLICIES
9. Trade Liberalization, Firm Performance and Labour Market Outcomes in the Developing World: What Can We Learn from Micro-LevelData?
10. The name is absent