In our system, a motion is defined by a sequence of
state transitions. Each state transition begins at time 0
and must be completed in 127 time units or less.
Negative time units represent the time units used during
the last state transition. Each state transition begins with
the origin of space located at the center of the torso. In
short, a state transition begins at (0, 0, 0, 0). All changes
during a state transition are specified within the
egocentric reference system.
Translation between the egocentric reference system
and its world reference system is done at the end of
each state transition. For example, beginning at a
standing position as shown in Figure 1, the robot moved
three units forward in positive y-axis direction and
completed at a standing position, and the whole
transition takes 9 units of time. Now, the center of the
torso is located at (0, 3, 0, 9). Assuming at the
beginning of the transition R(0, 0, 0, 0) in the robot’s
egocentric reference system is located at W(3, 2, 4, 2)
in its world reference system. Also assume that y-axes
of both systems are parallel and have the same
direction, and each unit in the egocentric reference
system represents 2 units in the world reference system.
To reset R(0, 3, 0, 9) back to R(0, 0, 0, 0), we makes
R(0, 0, 0, 0) now to corresponding to W(3, 2+3*2, 4,
2+9*2).
2.3 Progressive Quantized Refinement
We proposed a concept called Progressive Quantized
Refinement for a humanoid robot to interact with its
environments using different level of granularity.
Figure 2 illustrates the concept; on the left picture a 9x9
unit squares is used to display a room while on the right
picture the same sized 9x9 unit squares is used to
display part of a table. For a robot to put an object on
the table, the robot can first use the left picture to move
toward the table. Then, it can use the right picture to put
the object on the table.
At different states a robot can change its unit scale
factor as needed. For example, a unit length in the
robot’s egocentric space reference system can be scaled
to 1 cm, 1 inch, or 1 meter in its world reference
system. A unit time can be scaled, for example, to 1
second, 1 minute, or 5 minutes.
2.4 Automatic Constraint Satisfaction
We proposed to use Automatic Constraint Satisfaction
to reduce the complexity of specifying humanoid
motions. There are many implicit requirements for
locomotion, such as maintaining balance and structural
integrity. Automatic constraint satisfaction system will
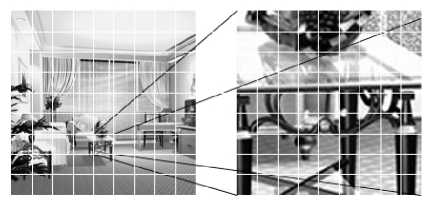
Figure 2. Concept of Progressive Quantized
Refinement
provide additional changes to meet the implicit
requirements.
A system for providing automatic constraint satisfaction
for locomotion is very complex and much research is
being done on areas such as motion planning and
constraint satisfaction. For example, we can simply
specify that the robot must move its right hand from
current position (3, 6, 2, 0) to new position (3, 50, 2, 6).
The simpler the specification, in most cases, requires
the more complex constraint satisfaction. In our
example, the hand must reach the new position using 6
units of time, so that speeds for various actuators must
be adjusted to meet this requirement. If the hand cannot
reach the new position by simply raising it and reaching
out, then the robot must move the whole body toward
the new position.
3. Acquiring New Motor Skills
The ability for acquiring new motor skills is essential
for mental developments. The trivial approach is to
simply program a humanoid robot for new required
motor skills, which can easily be done by an
experienced programmer using our proposed language
and framework. Thus, in the following, we will focus
on strategies for acquiring motor skills through learning
from trial and error and learning by macro approach.
3.1 Learning Motor Skills
Learning motor skills has not yet been a central focus of
Machine Learning researchers. Thus, much research
remains to be done on automatic acquiring new motor
skills. We briefly outline strategies for creating such a
system, which in part is based on the first author’s work
on automata for learning sequential tasks [Choi 98].
3.1.1 Learning from Trial and Error
One way for acquiring new motor skills is by trial and
error. This approach requires first identifying an
More intriguing information
1. Innovation Policy and the Economy, Volume 112. Implementation of the Ordinal Shapley Value for a three-agent economy
3. Natural hazard mitigation in Southern California
4. The name is absent
5. ‘I’m so much more myself now, coming back to work’ - working class mothers, paid work and childcare.
6. El Mercosur y la integración económica global
7. The name is absent
8. GENE EXPRESSION AND ITS DISCONTENTS Developmental disorders as dysfunctions of epigenetic cognition
9. The name is absent
10. Road pricing and (re)location decisions households