Although robot mental development is very much
a new concept (Weng et al., 2000b), a lot of well-
known self-organization tools can be used in design-
ing a developmental robot. In this paper, we sum-
marize our recent investigations on this new direc-
tion and hopefully provide some answers to the above
questions. In the following sections, we first outline
the previous and current projects related to robot
mental development conducted in our group. Then a
theory of autonomous mental development of robots
is presented followed by the experimental results on
the SAIL robot, a developmental robot constructed
following this theory. A brief comparison to others’
work is given before we draw the conclusion.
2. An outline of previous and current
pro jects
Our decade-long effort in enabling a machine to grow
its perceptual and behavioral capabilities has gone
through four systems: Cresceptron (1991 - 1995),
SHSOLIF (1993 - 2000), SAIL (1996 - present ) and
Dav (1999 - present).
Cresceptron is an interactive software
system for visual recognition and segmenta-
tion (Weng et al., 1997). The major contribution
is a method to automatically generate (grow) a
network for recognition from training images. The
topology of this network is a function of the content
of the training images. Due to its general nature
in representation and learning, it turned out to be
one of the first systems that have been trained to
recognize and segment complex objects of very dif-
ferent natures from natural, complex backgrounds.
Although Cresceptron is a general developmental
system, its efficiency is low.
SHOSLIF (Self-organizing Hierarchical Optimal
Subspace Learning and Inference Framework) was
the next project whose goal was to resolve the ef-
ficiency of self-organization. It automatically finds
a set of Most Discriminating Features (MDF) using
Principle Component Analysis (PCA) followed by
Linear Discriminant Analysis (LDA), for better gen-
eralization. It is a hierarchical structure organized by
a tree to reach a logarithmic time complexity. Using
it in an observation-driven Markov Decision Process
(ODMDP), SHOSLIF has successfully controlled the
ROME robot to navigate in MSU’s large Engineering
Building in real-time using only video cameras, with-
out using any range sensors (Weng and Chen, 1998).
All the real-time computing was performed by a
slow Sun SPARC Ultra-1 Workstation. Therefore,
SHOSLIF is very efficient for real-time operation.
However, it is not an incremental learning method.
SAIL (Self-organizing, Autonomous, Incremental
Learner) is the next generation after SHOSLIF. The
objective of this project is to automate the real-
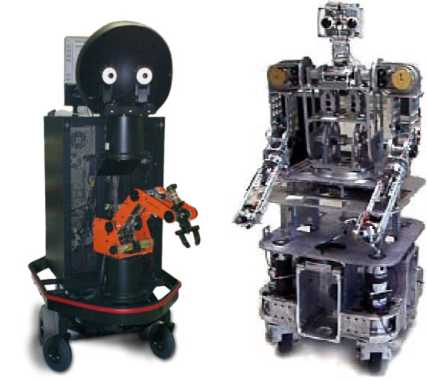
Figure 1: The SAIL (left) and Dav (right) robot.
time incremental development for robot perceptual
and behavioral capabilities. The internal represen-
tation of the SAIL robot (Fig. 1) is generated au-
tomatically by the robot itself, starting with a de-
sign of a coarse architecture. A self-organization
engine called Incremental Hierarchical Discrimi-
nant Regression (IHDR) was the critical technology
that achieves the stringent real-time, incremental,
small sample size, large memory, and better gen-
eralization requirements (Hwang and Weng, 2000a)
(Hwang and Weng, 2000b). IHDR automatically
and incrementally grows and updates a tree (net-
work) of nodes (remotely resemble cortical areas).
In each node is an incrementally updated feature
subspace, derived from the most discriminating fea-
tures for better generalization. Discriminating fea-
tures disregard factors that are not related to percep-
tion or actions, such as lighting in object recognition
and autonomous navigation.
Dav robot (Fig. 1) is a humanoid robot, currently
being developed as a next-generation test-bed for
experimental investigations into autonomous men-
tal development (Han et al., 2002). This general-
purpose humanoid platform consists of a total of
43 degrees of freedom (DOF), including drive base,
torso, arms, hands, neck and head. The body may
support a wide array of locomotive and manipulative
behaviors. For perception, Dav is equipped with a
variety of sensing systems, including visual, auditory
and haptic sensors. Its computational resource is to-
tally onboard, including quadruple Pentium III plus
PowerPCs, large memory and storage, networks, and
long-sustenance power supply.
More intriguing information
1. The magnitude and Cyclical Behavior of Financial Market Frictions2. The Folklore of Sorting Algorithms
3. Political Rents, Promotion Incentives, and Support for a Non-Democratic Regime
4. The name is absent
5. The name is absent
6. The name is absent
7. The name is absent
8. INTERPERSONAL RELATIONS AND GROUP PROCESSES
9. Portuguese Women in Science and Technology (S&T): Some Gender Features Behind MSc. and PhD. Achievement
10. CAN CREDIT DEFAULT SWAPS PREDICT FINANCIAL CRISES? EMPIRICAL STUDY ON EMERGING MARKETS