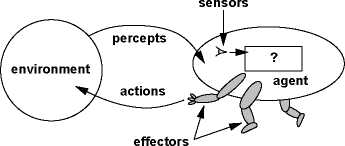
Figure 2: The abstract model of a traditional agent,
which perceives the external environment and acts on it
(adapted from (Russell and Norvig, 1995)). The source
of perception and the target of action do not include the
agent brain representation.
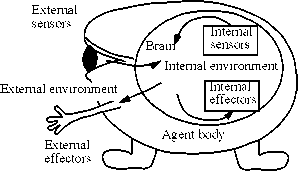
Figure 3: A self-aware self-effecting (SASE) agent. It
interacts with not only the external environment but also
its own internal (brain) environment: the representation
of the brain itself.
3. A theory for mentally developing
robots
Evolving with the above robot pro jects is a theoretic
framework for autonomous mental development of
robots. We present the major components of this
theory here. For more details, the reader is referred
to (Weng, 2002).
3.1 SASE Agents
Defined in the standard AI literature (see, e.g., an ex-
cellent textbook (Russell and Norvig, 1995) and an
excellent survey (Franklin, 1997)), an agent is some-
thing that senses and acts, whose abstract model is
shown in Fig. 2. As shown, the environment E of an
agent is the world outside the agent.
To be precise in our further discussion, we need
some mathematical notation. A context of an agent
is a stochastic process (Papoulis, 1976), denoted by
g(t). It consists of two parts g(t) = (x(t), a(t)),
where x(t) denotes the sensory vector at time t which
collects all signals (values) sensed by the sensors of
the agent at time t, a(t) the effector vector consist-
ing of all the signals sent to the effectors of the agent
at time t. The context of the agent from the time t1
(when the agent is turned on) up to a later time t2 is a
realization of the random process {g(t) | t1 ≤ t ≤ t2}.
Similarly, we call {x(t) | t1 ≤ t ≤ t2} a sensory con-
text and {a(t) | t1 ≤ t ≤ t2} an action context.
The set of all the possible contexts of an environ-
ment E is called the context domain D. As indicated
by Fig. 2, at each time t, the agent senses vector x(t)
from the environment using its sensors and it sends
a(t) as action to its effectors. Typically, at any time
t the agent uses only a subset of the history repre-
sented in the context, since only a subset is mostly
related to the current action.
The model in Fig. 2 is for an agent that perceives
only the external environment and acts on the exter-
nal environment. Such agents range from a simple
thermostat to a complex space shuttle. This well ac-
cepted model played an important role in agent re-
search and applications. Unfortunately, this model
has a fundamental flaw: It does not sense its internal
“brain” activities. In other words, its internal deci-
sion process is neither a target of its own cognition
nor a subject for the agent to explain.
The human brain allows the thinker to sense
what he is thinking about without performing an
overt action. For example, visual attention is a
self-aware self-effecting internal action (see, e.g.,
(Kandel et al., 1991), pp. 396 - 403). Motivated by
neuroscience, it is proposed here that a highly in-
telligent being must be self-aware and self-effecting
(SASE). Fig. 3 shows an illustration of a SASE agent.
A formal definition of a SASE agent is as follows:
Definition 1 A self-aware and self-effecting
(SASE) agent has internal sensors and internal
effectors. In addition to interacting with the ex-
ternal environment, it senses some of its internal
representation as a part of its perceptual process and
it generates actions for its internal effectors as a
part of its action process.
Using this new agent model, the sensory context x(t)
of a SASE agent must contain information about not
only external environment E, but also internal rep-
resentation R. Further, the action context a(t) of a
SASE agent must include internal effectors that act
on R.
A traditional non-SASE agent does use internal
representation R to make decision. However, this
decision process and the internal representation R is
not included in what is to be sensed, perceived, rec-
ognized, discriminated, understood and explained by
the agent itself. Thus, a non-SASE agent is not able
to understand what it is doing, or in other words,
it is not self-aware. Further, the behaviors that it
generates are for the external world only, not for the
brain itself. Thus, it is not able to autonomously
change its internal decision steps either. For exam-
ple, it is not able to modify its value system based on
its experience about what is good and what is bad.
It is important to note that not all the internal
brain representations are sensed by the brain itself.
For example, we cannot sense why we have interest-
ing visual illusions (Eagleman, 2001).
More intriguing information
1. Government spending composition, technical change and wage inequality2. The name is absent
3. Une Classe de Concepts
4. The name is absent
5. Are Public Investment Efficient in Creating Capital Stocks in Developing Countries?
6. How we might be able to understand the brain
7. A Principal Components Approach to Cross-Section Dependence in Panels
8. The name is absent
9. The name is absent
10. Knowledge, Innovation and Agglomeration - regionalized multiple indicators and evidence from Brazil