28
Joachim Funke
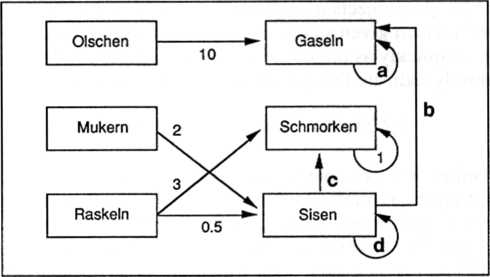
Figure 1. Causal structure of the system SINUS. The weight parameters a, b, c, and d are
subject to experimental changes. The standard configuration is a = 1, b = 0, c = 0.2, and
d = 0.9.
Subjects are told that this fictitious system consists of living creatures
from a distant planet called SINUS. The “exogenous” variables are intro-
duced as creatures labeled “Gaseln” (yι), “Schmorken” (уг) and “Sisen” (уз),
the “endogenous” creatures are called “Olschen” (xι), “Mukern” (x2) and
“Raskeln” (хз). The system has the following structure (parameters a, b, c,
and d are variable weights):
yιt+* = 10.0× xιl + a× yιt + b× уз'.
У2 , = 3.0× хз' + 1.0× уг’ + c× уз‘,
y3t+' = 2.0× x2t + 0.5× хз' + dx уз*.
(2)
(3)
(4)
The task for subjects is first to explore the system (i.e. the causal links
between the system variables) and then to control the endogenous variables
(= the numbers of у-creatures) by means of the exogenous variables with
respect to a set of given goal states. Parameters а-d are manipulated depend-
ing on the experimental conditions (see below).
2.2 General Experimental Procedure
In our experiments, subjects pass through at least two phases. In the first
phase, the “knowledge acquisition phase,” subjects can explore the system
and its behavior as they like (see also Moray, Lootsteen & Pajak, 1986;
Shrager & Klahr, 1986). They can take actions (i.e., make an intervention on
one or more of the exogenous variables) and observe the resulting effects in
the endogenous variables. Figure 2 shows how SINUS is presented to sub-
jects.
More intriguing information
1. On Dictatorship, Economic Development and Stability2. The name is absent
3. The name is absent
4. The name is absent
5. Urban Green Space Policies: Performance and Success Conditions in European Cities
6. The name is absent
7. Improvement of Access to Data Sets from the Official Statistics
8. WP RR 17 - Industrial relations in the transport sector in the Netherlands
9. The name is absent
10. The Trade Effects of MERCOSUR and The Andean Community on U.S. Cotton Exports to CBI countries