LM1∆θ
2∆θ
LM3∆θ
the pan angle of the robot’s camera . !M
when it attends to an object [deg] successrate OfJOUrtattention selecting rate of δθ
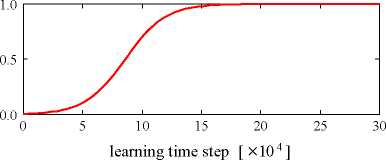
(a) gating function
( I ) ( II ) ( III )
Il I
1.0
0.8
0.6
0.4
0.2
0.0
0 5 10 15 20 25 30
learning time step [ × 1 0 4 ]
(b) success rate of joint attention
( II )
( III )
input image of
learning module
output of
learning module
gazing area
object position
Figure 7: The change of the camera image when the robot
shifts its gaze direction from the caregiver’s face to the
object
40
20
0
-20
-40
2 3
© θ о
CP'Q> ;O'z:,6°-/',
oɔ √d oo <sεo
αO OcO <p
° & o∞o і
------8.β...o..
--V--o-β--jSep⅛p-
g ⅞θo ft<⅜
oo ⅛fc> соо
⅛%°S cP o°
, ° o°%o
i Q×
O ° о C

27 28
12
13
learning time step [ × 1 0 4 ]
O : success of joint attention
X : failure of joint attention
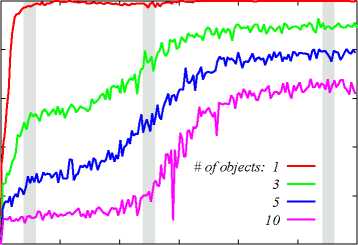
(c) incremental learning process (# of objects: 5)
4. Conclusion
This paper has presented a constructive model which
enables a robot to acquire the ability of joint atten-
tion without a controlled environment nor external
task evaluation. The proposed model affords the
ability of joint attention by finding the appropriate
sensorimotor coordination for joint attention based
on the embedded mechanisms: visual attention and
learning with self-evaluation. The experimental re-
sults show that the robot acquires the ability of joint
attention through the incremental learning process
that is similar to the infant’s developmental process
of joint attention. Therefore, we can suggest that
the proposed model could explain how the infant ac-
quires the ability of joint attention.
In the future, more efficient learning mechanism
should be developed so that the learning is executed
not on the simulation but on the actual robot. In
addition, the gating function should be designed not
by the deterministic one, like a sigmoid function, but
by the robot’s performance of visual attention. The
realization of these could make the robot become a
really developmental agent. Furthermore, it would
lead us to understand the mechanism of the infant’s
development more clearly.
Acknowledgment
This study was performed through the Advanced and
Innovational Research program in Life Sciences from
the Ministry of Education, Culture, Sports, Science,
and Technology, the Japanese Government.
References
Figure 6: Experimental results
Asada, M., MacDorman, K. F., Ishiguro, H., and
Kuniyoshi, Y. (2001). Cognitive developmen-
tal robotics as a new paradigm for the design
of humanoid robots. Robotics and Autonomous
Systems, 37:185-193.
More intriguing information
1. The name is absent2. Synchronisation and Differentiation: Two Stages of Coordinative Structure
3. The Environmental Kuznets Curve Under a New framework: Role of Social Capital in Water Pollution
4. NATIONAL PERSPECTIVE
5. Output Effects of Agri-environmental Programs of the EU
6. The name is absent
7. The name is absent
8. Benchmarking Regional Innovation: A Comparison of Bavaria, Northern Ireland and the Republic of Ireland
9. The Determinants of Individual Trade Policy Preferences: International Survey Evidence
10. The name is absent