|
Stress |
r-squarod |
Importance Dimension 1 |
Importance Dimension 2 | |
|
Robot movement (a) |
“0Л2 |
^^R98 |
^^R96 |
^^CL02 |
|
Robot movement (b) |
0.20 |
0.90 |
0.53 |
0.37 |
|
CG movement (a) |
0.13 |
0.97 |
0.93 |
0.04 |
|
CG movement (b) |
0.17 |
0.95 |
0.88 |
0.07 |
Table 1: Results of INDSCAL algorithm fits to the participants responses
humanoid
movement b
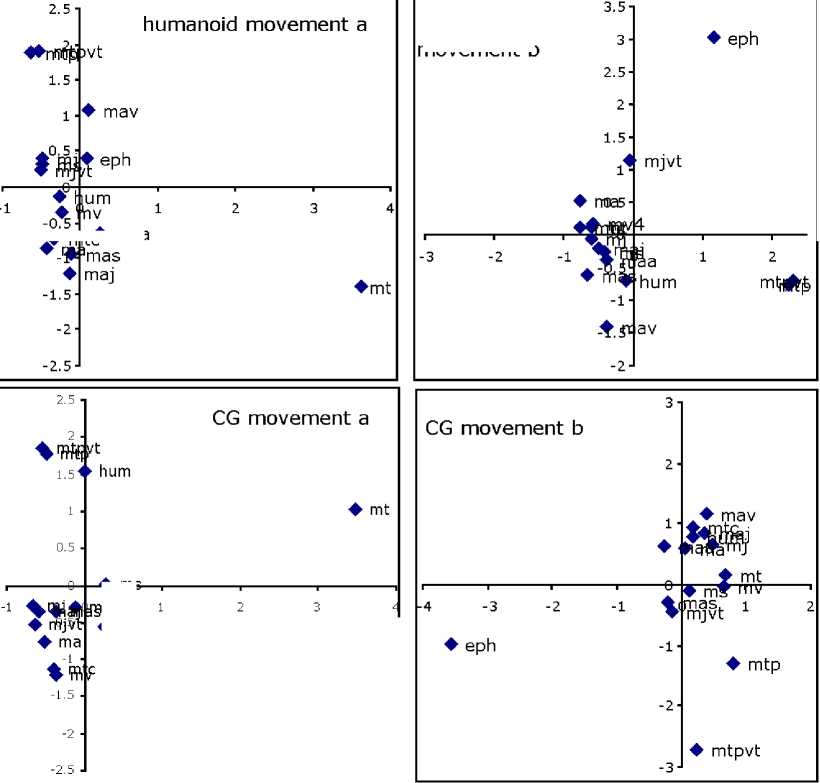
n∣ty maa
♦ ms
♦ mav
♦ eph
Figure 1: Results of the INDSCAL algorithm for the fits to participants pairwise dissimilarity judgments
ablcs underlying the dimensions are the velocity of
the movement, the path of the hand and the pos-
tures of the entire body as the hand traverses a path.
Though it might bo difficult to separate those possi-
bilities into independent components.
The fact that dimension 1 is used primarily for the
fast movements raises the possibility that it is related
to the velocity of the movement. Consistent with this
is the observation that dimension 1 appears to sep-
arate movements according to qualitative properties
of the velocity field. For example at the rightmost ex-
treme are techniques MxAV and MV that are known
to create discontinuous velocity profiles, around the
middle of dimension 1 are techniques which have boll
shaped velocity profiles and at the leftmost extreme
are the techniques MTP and MTPVT which have
boll shaped velocity profiles that are skewed.
The fact that dimension 2 is involved for slow
movements is consistent with the idea that it involves
the processing of information such as postures that
should bo difficult to perceive for fast movements.
In addition, if dimension 1 corresponds to sensitivity
to the velocity profile then it can bo expected that
perceptual estimates of the velocity profile might bo-
More intriguing information
1. Natural hazard mitigation in Southern California2. Spatial Aggregation and Weather Risk Management
3. A Consistent Nonparametric Test for Causality in Quantile
4. Global Excess Liquidity and House Prices - A VAR Analysis for OECD Countries
5. The name is absent
6. FUTURE TRADE RESEARCH AREAS THAT MATTER TO DEVELOPING COUNTRY POLICYMAKERS
7. How we might be able to understand the brain
8. Ronald Patterson, Violinist; Brooks Smith, Pianist
9. Anti Microbial Resistance Profile of E. coli isolates From Tropical Free Range Chickens
10. Commuting in multinodal urban systems: An empirical comparison of three alternative models