|
Track |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
Fitness (sd) |
1.66 (0.12) |
1.86 (0.02) |
2.27 (0.45) |
2.66 (0.3) |
2.19 (0.23) |
2.47 (0.18) |
0.22 (0.15) |
0.15 (0.01) |
TABLE V
Fitnes s of a further evolved general controller with evolvable sensor parameters on the different tracks. Compound fitness
2.22 (0.09).
|
Track |
10 |
50 |
100 |
200 |
Pr. |
|
“1 |
1.9 (0.1) |
1.99 (0.06) |
2.02 (0.01) |
2.04 (0.02) |
10 |
|
2 |
2.06 (0.1) |
2.12 (0.04) |
2.14 (0) |
2.15 (0.01) |
10 |
|
3 |
3.25 (0.08) |
3.4 (0.1) |
3.45 (0.12) |
3.57 (0.1) |
10 |
|
4 |
3.35 (0.11) |
3.58 (0.11) |
3.61 (0.1) |
3.67 (0.1) |
10 |
|
5 |
2.66 (0.13) |
2.84 (0.02) |
2.88 (0.06) |
2.88 (0.06) |
10 |
|
6 |
2.64 (0) |
2.71 (0.08) |
2.72 (0.08) |
2.82 (0.1) |
10 |
|
7 |
1.53 (0.29) |
1.84 (0.13) |
1.88 (0.12) |
1.9 (0.09) |
10 |
|
8_______ |
0.59 (0.15) |
0.73 (0.22) |
0.85 (0.21) |
0.93 (0.25) |
0____ |
TABLE VI
Fitness of best controllers, evolving controllers
SPECIALISED FOR EACH TRACK, STARTING FROM A FURTHER EVOLVED
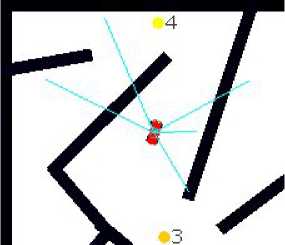
Fig. 6. Sensor setup of a controller specialized for, and able to consistently
reach good fitness on, track 7. Presumably the use of all but one sensor and
their angular spread reflects the large variety of different situations the car
has to handle in order to navigate this more difficult track.
GENERAL CONTROLLER WITH EVOLVED SENSOR PARAMETERS.
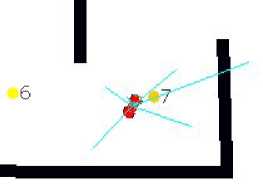
Fig. 5. Sensor setup of controller specialized for track 5. While more or
less retaining the two longest-range sensors from the further evolved general
controller it is based on, it has added medium-range sensors in the front and
back, and a very short-range sensor to the left.
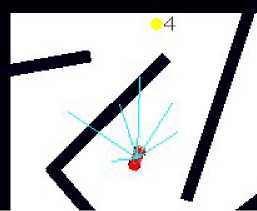
Fig. 7. Sensor setup of another controller specialized for track 7, like the
one in figure 6 seemingly using all its sensors, but in a quite different way.
controllers. For each track, 10 evolutionary runs were made,
where the initial population was seeded with the general
controller and evolution was allowed to continue for 200
generations. Results are shown in table VI. The mean fitness
improved significantly on all six first tracks, and much of
the fitness increase occured early in the evolutionary run,
as can be seen from a comparison with table V. Further,
the variability in mean fitness of the specialized controllers
from different evolutionary runs is very low, meaning that the
reliability of the evolutionary process is very high. Perhaps
most surprising, however, is that all 10 evolutionary runs
produced proficient controllers for track 7, on which the
general controller had not been trained (and indeed had very
low fitness) and for which it had previously been found to
be impossible to evolve a proficient controller from scratch.
Analysis of the evolved sensor parameters of the special-
ized controllers show a remarkable diversity, even among
controllers specialized for the same track, as evident in
figures 5, 6 and 7. Sometimes, no similarity can be found
between the evolved configuration and either the original
sensor parameters or those of the further evolved general
controller the specialization was based on.
VII. Observations on evolved driving behaviour
It has previously been found that the evolutionary approach
used in this paper can produce controllers that outperform
human drivers[4]. To corroborate this result, one of the
authors measured his own performance on the various tracks,
driving the car using keyboard inputs and a suitable delay
of 50 ms between timesteps. Averaged over 10 attempts,
the author’s fitness on track 2 was 1.89, it was 2.65 on
track 5, and 1.83 on track 7, numbers which compare rather
unfavourably with those found in table VI. The responsible
author would like to believe that this says more about the
capabilities of the evolved controllers than those of the
author.
Traces of steering and driving commands from the evolved
controllers show that they often use a PWM-like technique,
in that they frequently - sometimes almost every timestep -
change what commands they issue. For example, the general
controller used as the base for the specializations above
employs the tactic of constantly alternating between steering
left and right when driving parallell to a wall, giving the
appearance that the car is shaking. Frequently alternating
More intriguing information
1. The Shepherd Sinfonia2. Heterogeneity of Investors and Asset Pricing in a Risk-Value World
3. APPLYING BIOSOLIDS: ISSUES FOR VIRGINIA AGRICULTURE
4. El impacto espacial de las economías de aglomeración y su efecto sobre la estructura urbana.El caso de la industria en Barcelona, 1986-1996
5. The name is absent
6. The name is absent
7. The name is absent
8. The name is absent
9. Studying How E-Markets Evaluation Can Enhance Trust in Virtual Business Communities
10. The name is absent