50
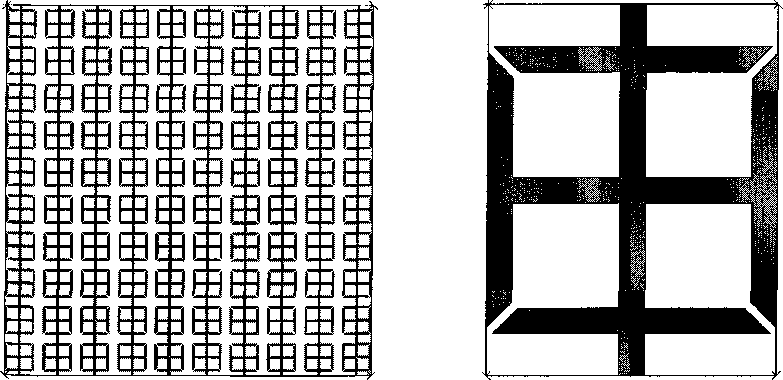
(a) Single SLM pixel (b) single SRR element
Figure 5.6 : Geometry of (a) one SLM pixel and (b) one metamaterial SRR element
of the SLM. Each single pixel (880 μm×860 μm) contains a 10×10 element array of
metamaterial SRRs. Each SRR element is 88 μm×86 μm, with 6 μm-wide metal and
2 μm split gaps.
through a typical SLM pixel when the beam is linearly polarized parallel to and
perpendicular to the connecting wires of the SRRs in the SLM respectively. Maximum
modulation observed from OV bias to 16V bias is 25% at 0.42 THz for terahertz
polarization parallel to the connecting wires and is 20% at 0.37THz for the other
polarization.
This experiment raster-scans the SLMs using a pinhole (with diameter less than
lmm) at the focal plane of the THz beam. At each pixel, the amplitude transmission
waveforms are measured at both OV and 16V biases. Figure 5.8(b) and 5.10(b) show
the modulation depth (amplitude change from OV to 16V) at 0.37 THz for each
pixel of SLM 1 and SLM 2 respectively. In both cases, the teraherz polarization is
perpendicular to the connecting wires in the SLM. The SLM pixels having modulation
depth around 20% appear as dark image pixels, while the SLM pixels having zero
More intriguing information
1. Quality practices, priorities and performance: an international study2. Determinants of Household Health Expenditure: Case of Urban Orissa
3. IMPLICATIONS OF CHANGING AID PROGRAMS TO U.S. AGRICULTURE
4. The Advantage of Cooperatives under Asymmetric Cost Information
5. Elicited bid functions in (a)symmetric first-price auctions
6. Private tutoring at transition points in the English education system: its nature, extent and purpose
7. The name is absent
8. MULTIMODAL SEMIOTICS OF SPIRITUAL EXPERIENCES: REPRESENTING BELIEFS, METAPHORS, AND ACTIONS
9. DETERMINANTS OF FOOD AWAY FROM HOME AMONG AFRICAN-AMERICANS
10. Female Empowerment: Impact of a Commitment Savings Product in the Philippines