these layers, incorporating learning schemes to obtain a higher adaptiveness in the behaviour
production.
With this work we have intended to reach two goals: (1) to map the main principles and
properties that characterize animal behaviour onto a bottom-up, evolutionary construction of
behaviour-based systems, and (2) to use the BPS to experiment with animal behaviour
properties that this one is able to reproduce, also providing a better understanding of adaptive
behaviour. This implies a journey, from biology to behaviour-based systems and back (Maes,
1991).
3.3. Blackboard Node Architecture
The concept of blackboard architecture (Nii, 1989; Engelmore, Morgan and Nii, 1988)
was conceived by AI researchers in the 1970's. The goal of this architecture was to handle the
problem of shared information among multiple expert agents involved in problem solving. The
blackboard architecture was implemented for the first time in the language understanding
system Hearsay II (Engelmore, Morgan and Nii, 1988), and later it has been used in a great
variety of problem domains, and abstracted in many environments for systems implementation.
Figure 6 shows the basic components of the blackboard architecture.
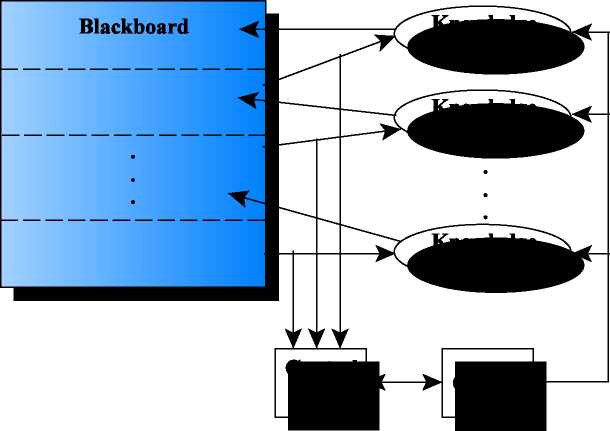
Figure 6. Components of the blackboard architecture.
The behaviours production system presented here has been structured from a network
of blackboard nodes (Gonzalez and Negrete, 1997; Negrete and Gonzalez, 1998). A blackboard
node is a blackboard system integrated by the following components: (1) a set of independent
modules called knowledge sources, which have specific knowledge about the problem domain;
31
More intriguing information
1. An Economic Analysis of Fresh Fruit and Vegetable Consumption: Implications for Overweight and Obesity among Higher- and Lower-Income Consumers2. Personal Income Tax Elasticity in Turkey: 1975-2005
3. Optimal Vehicle Size, Haulage Length, and the Structure of Transport Costs
4. What Lessons for Economic Development Can We Draw from the Champagne Fairs?
5. THE CHANGING RELATIONSHIP BETWEEN FEDERAL, STATE AND LOCAL GOVERNMENTS
6. Multifunctionality of Agriculture: An Inquiry Into the Complementarity Between Landscape Preservation and Food Security
7. The name is absent
8. The name is absent
9. Understanding the (relative) fall and rise of construction wages
10. MULTIPLE COMPARISONS WITH THE BEST: BAYESIAN PRECISION MEASURES OF EFFICIENCY RANKINGS