Mirror System
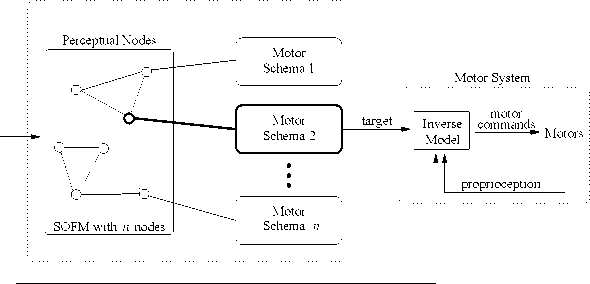
Figure 1: The architecture consists of (1) a mirror system, which is a coupling of perceptual and motor structures that
are built up from experience; and (2) a motor system, which consists of innate skills that can convert the output of the
mirror system into motor commands.
we are considering more complex relationships (e.g.
many-to-one).
2.1 Building the Mirror System
The structures that make up the mirror system
shown in Figure 1 are built up from experience, dur-
ing a learning phase. A temporal attention system is
used to categorise the perceptual input of the mirror
system into discrete perceptual structures, and each
perceptual structure is then associated directly to a
motor structure. The development of the mirror sys-
tem is therefore Perceptuo-Centrically driven, i.e. it
is built bottom-up through perceptual experience.
Perceptual Nodes
The perceptual categorisation is achieved using a
Self Organising Feature Map (SOFM), which is a
useful tool for modelling robotic sensory input (see
for example Nehmzow, 1999). The SOFM attempts
to cover the sensory input space with a network
of nodes, and edges connecting neighbouring nodes
determined by a Euclidean distance measure; it is
topology-preserving, i.e. a cluster of nodes repre-
sents a region in the sensory space. We are interested
in a variation of the SOFM, where structures (nodes
in the network) grow from experience as required,
rather than being specified a-priori.
We have adopted and suited to our purposes an al-
gorithm developed by Marsland et al. (2001), which
incorporates notions of habituation, novelty detec-
tion, and forgetting. Because of the growing, self-
organised nature of the system, it reflects at any one
time the current perceptual ‘memory’ of the agent,
and can easily adapt and accommodate new experi-
ences.
The attention system is described in detail in
(Marom et al., 2002), including a discussion of the
various parameters. Briefly, the algorithm involves
creating, modifying, and deleting nodes and edges in
response to on-line input, as follows:
• the sensory input is converted into a multi-
dimensional vector in the same space as the nodes
in the SOFM.
• the similarity of the input to all the existing nodes
is measured using a Euclidean distance measure,
and the closest node is referred to as the ‘winning’
node;
• if the input matches the winning node well (sig-
nalled through a novelty threshold), the winning
node and its neighbours habituate, and move to-
wards the input by a small fraction of the distance
to the input;
• otherwise the input is novel, so a new node is
created between the input and the winning node;
• if a node is completely habituated (signalled
through a full-habituation threshold), it is
‘frozen’: the node does not move from where it
is, and cannot be deleted; a forgetting mechanism
forces nodes to dishabituate at regular intervals,
and hence re-attend to their respective inputs;
• an edge is created between the winning node
and the second-best node, while other edges con-
nected to the winning node are aged; when an
edge is old enough it is deleted, and any discon-
nected nodes are deleted.
The system can thus handle novelty, avoid attending
to familiar stimuli, but adapt to changing stimuli.
The system is said to be attentive when nodes are
responding to stimuli, that is, when the nodes are
not all fully habituated. There are a number of pa-
rameters needed for the algorithm, but the most im-
portant one for the experiments in this paper is the
More intriguing information
1. The technological mediation of mathematics and its learning2. The name is absent
3. Improving behaviour classification consistency: a technique from biological taxonomy
4. The English Examining Boards: Their route from independence to government outsourcing agencies
5. The name is absent
6. Literary criticism as such can perhaps be called the art of rereading.
7. Review of “The Hesitant Hand: Taming Self-Interest in the History of Economic Ideas”
8. Innovation and business performance - a provisional multi-regional analysis
9. Kharaj and land proprietary right in the sixteenth century: An example of law and economics
10. Modelling Transport in an Interregional General Equilibrium Model with Externalities