model, an agent can learn how to use its innate mo-
tor skills to achieve a particular demonstrated task.
Thus, the ability to recognise and reproduce actions
can develop from innate skills through social situ-
atedness. Wo will demonstrate the implementation
of this system on two sots of experiments, a simu-
lated humanoid robot learning to pick up a glass,
and a physical robot learning from a human to fol-
low walls. Wo have also implemented the latter in
simulation (Marom ot al., 2002) but do not include
it in this paper duo to space considerations.
4. Object-Interactions Experiment
The experiment presented in this section involves
two elevon degrees of freedom simulated humanoid
robots (waist upwards), a demonstrator and an im-
itator, interacting with an object. Each robot has
throe degrees of freedom at the nock, throe at each
shoulder, and one at each elbow. The robots are
allowed to interact with one object each. The ob-
jects are identical and have six degrees of freedom,
i.e. they can move in any position and orientation in
3D space. The dynamics of each robot are simulated
in DynaMochs (McMillan ct al., 1995), a collection
of C++ libraries that simulate the physics involved
with objects and joint control. The torque for the
control of each joint, i.e. the input to DynaMochs,
is calculated with the aid of a Proportional-Integral-
Dorivativo (PID) controller, which converts postu-
ral targets (i.e. via points for each joint) into such
torque values.
The demonstrator is controlled by a sequence of
such postural targets to interact with its object,
which is lying on a surface at waist level. The pos-
tural targets control the demonstrator to ‘grasp’ the
object, pick it up, ‘drink’ its hypothetical contents,
and then put it back on the surface (seo Figure 2).
The absence of fingers, however, as well as software
limitations load to a rather crude robot-object inter-
action: namely the object is merely attached to (or
detached from) the wrist, as long as this is desired
and the wrist is close enough, i.e. the object is
weightloss.
The system described in the previous section is
used to model and control the perceptual-motor skill
of the imitator, the skills of the demonstrator are
hand-crafted and do not change; this is the case for
all the experiments reported in this paper. In this
experiment, the input to the system comes from a
crude approximation to visual perception which con-
sists of the joint angles of the observed demonstra-
tor (11 degrees of freedom), plus their corresponding
joint velocities (another 11), plus the position and
orientation information of the observed object (6 de-
grees of freedom), plus their corresponding velocities
(another 6) — 34 dimensions in total, whore noise
is also added to each. Similarly, the proprioception
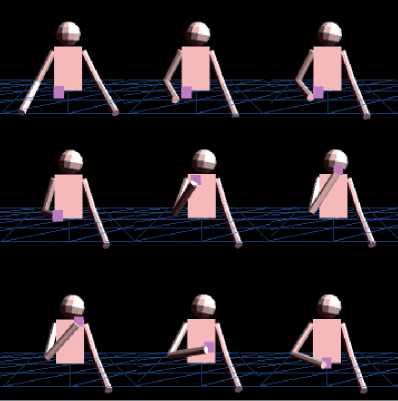
Figure 2: A sequence of snapshots of the demonstrated
behaviour; left to right, top to bottom.
of the imitator is approximated as explicit access to
the noisy version of its own joint-angles and joint-
velocities.
Notice that the imitator perceives the demonstra-
tor in the same way it perceives itself, and thus the
imitator can directly represent what it is trying to
imitate, as described in Section 2. In other words,
the perceived input can bo directly stored as targets
to bo achieved by the motor system (via the inverse
model).
Hero the inverse model consists of 2 parts: (1) the
PID controller is used for posture control: targets
are passed into the PID controller which together
with proprioceptive feedback calculates the required
torque (or motor commands) of each limb; (2) a sot
of boundary conditions for object-interactions, which
specify when the wrist is close enough to pick up the
glass, when the wrist/glass is close enough to the
mouth to ‘drink’, and when the wrist∕glass is close
enough to the table to put down the glass (those
boundary conditions are sot to a radius of approxi-
mately 4 cm from the centre of the glass, mouth, and
table).
To summarise, the stimulus in this experiment is a
34-dimonsional vector that represents the imitator’s
perception of the demonstrator and the object, and
the motor commands calculated by the inverse model
are used to control each of the imitator’s limbs, and
the object-interaction mechanism.
4-1 Learning & Recall
In this experiment, during the learning phase the im-
itator merely observes the demonstrator, analysing
the visual perception of what the demonstrator is do-
ing by training its SOFM; it doos not try to replicate
More intriguing information
1. Peer Reviewed, Open Access, Free2. Fiscal Sustainability Across Government Tiers
3. LOCAL CONTROL AND IMPROVEMENT OF COMMUNITY SERVICE
4. The economic doctrines in the wine trade and wine production sectors: the case of Bastiat and the Port wine sector: 1850-1908
5. The Tangible Contribution of R&D Spending Foreign-Owned Plants to a Host Region: a Plant Level Study of the Irish Manufacturing Sector (1980-1996)
6. The name is absent
7. A MARKOVIAN APPROXIMATED SOLUTION TO A PORTFOLIO MANAGEMENT PROBLEM
8. IMPACTS OF EPA DAIRY WASTE REGULATIONS ON FARM PROFITABILITY
9. The name is absent
10. PER UNIT COSTS TO OWN AND OPERATE FARM MACHINERY