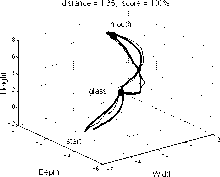
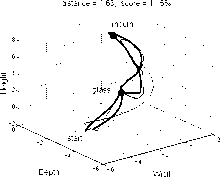
Figure 4: Visual inspection of the recalled behaviour:
the trajectories of the right hand wrists of the demon-
strator (bold font) and the imitator (normal font) in a
single episode in the recall phase, (a) trajectories of a
successfully learned behaviour; (b) a less successful one.
The black spheres on the plots denote the task subgoals
(i.e. glass and mouth), and their radii the corresponding
boundary conditions.


the performance measures as a function of SOFM
network size (number of nodes, which is governed by
the novelty threshold). We have used 22 different
novelty threshold values, which result in networks of
sizes varying from 5 to 60; for each threshold value
the experiment is repeated 50 times.
We measure the distance between the two trajec-
tories by calculating the Euclidean distance between
them at each time-step (this simple calculation does
not take into account the time-lag between imitator
and demonstrator, however we have also calculated
the distance using a short-term memory window, and
the results were similar). The distances measured are
shown in Figure 5, as a function of SOFM network
size. We see that the path trajectories are consis-
tently close to the demonstrator’s, for all network
sizes greater than 5.
Note that the distance we are calculating is only
a measure of the form of the movement; it does not
measure how successful the imitator is in achieving
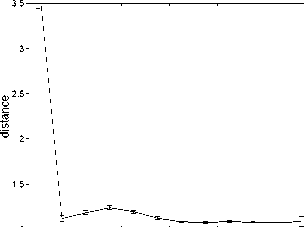
ι∣-------------------'------------------'-------------------'-------------------'------------------'-------------—
0 10 20 30 40 50 60
number of nodes
Figure 5: Evaluation of the recalled behaviour as a func-
tion of network size. The Euclidean distance between the
right-hand wrists of the demonstrator and the imitator is
an approximated measure of the form of the movement.
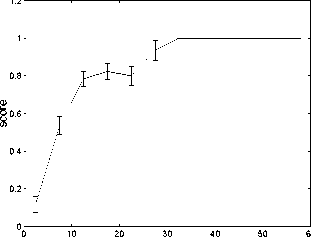
number of nodes
Figure 6: Score obtained at the recall phase, as a function
of network size. The score is a measure of how well the
imitator achieves the task.
the task. In fact it is possible that the trajectory
of the imitator is close to the demonstrator’s, but
the imitator fails to to pick up the glass, etc. This
can sometimes happen for small networks, where the
trajectory is good, but because there are not many
nodes the imitator is actually ‘cutting corners’ and
missing the glass, or missing the mouth, etc.; that is
there is not enough detail in the representation.
To test the success of the recalled action with re-
spect to the task, we have devised another measure
which scores the behaviour. The imitator can get
scores by achieving any combination of the following
3 goals: (A) picking up the glass, (B) ‘drinking’ from
the glass, and (C) putting the glass back on the ta-
ble; a bonus is given if all 3 goals are achieved, which
corresponds to a perfect execution of the task. We
calculate a score similarly for the demonstrator, and
then scale the imitator’s score by the demonstrator’s,
because the imitator can only perform as well as the
demonstrator, who occasionally fails in parts of the
task (due to noise).
The scores obtained are shown in Figure 6, as a
function of network size. We see that indeed the
small-sized networks (< 10 nodes) that achieve good
trajectories (Figure 5), are in fact not very success-
fully in achieving the task. The best networks are
those of 30 or more nodes, as they can match the
demonstrated movement and achieve perfect object-
interactions.
5. Wall-Following Experiment
The experiments presented in this section were per-
formed using our Real World Interface (RWI) B21
robot, Gillespie, and a human demonstrator, as
shown in Figure 7; the robot is programmed to de-
tect and follow the human using its on-board video
camera; this is done using a simple colour-tracking
algorithm — the demonstrator is wearing a green
shirt which is easily detectable. The arena is approxi-
mately a 5m × 5m square. The task is wall-following.
More intriguing information
1. ASSESSMENT OF MARKET RISK IN HOG PRODUCTION USING VALUE-AT-RISK AND EXTREME VALUE THEORY2. Synchronisation and Differentiation: Two Stages of Coordinative Structure
3. Name Strategy: Its Existence and Implications
4. The name is absent
5. The magnitude and Cyclical Behavior of Financial Market Frictions
6. Bird’s Eye View to Indonesian Mass Conflict Revisiting the Fact of Self-Organized Criticality
7. Structural Conservation Practices in U.S. Corn Production: Evidence on Environmental Stewardship by Program Participants and Non-Participants
8. The name is absent
9. Can we design a market for competitive health insurance? CHERE Discussion Paper No 53
10. Legal Minimum Wages and the Wages of Formal and Informal Sector Workers in Costa Rica