Figure 1: Kismet: the robotic head.
The behavior system provides structure and an ar-
biter for the robot’s multiple behaviors. The lat-
ter are all self-interested mechanisms which compete
with each other to be active at any one time. The
activation of a particular behavior will depend on the
current state of the robot’s motivational system, as
well as considerations of coherency, persistence and
opportunism.
There are four lip actuators, and a single DoF jaw
that together work to lip-synch to the speech pro-
duced by a synthesizer. The synthesizer software is
DECTalk v4.5, based on the Klatt synthesizer, cited
in (Breazeal, 2000), which models the physiological
characteristics of the human articulatory tract. This
enables the robot to speak in a youthful tone of voice,
and to vary the parameters of the synthesizer to ac-
count for variation in its emotional state.
4.2 Proto-verbal behaviors
We have designed and implemented a new vocal be-
havior system on Kismet which we call protoverbal
for two reasons. On the one hand, the behavior ex-
hibited by the system, if observed in a human in-
fant, would be called a precursor to language devel-
opment. The goal of the system is to produce the
kind of vocal output that a prelinguistic infant may
produce in the age range of 10-12 months, namely
emotive grunts, canonical babblings, and a formulaic
protolanguage (see Table 1) similar to that described
in (Halliday, 1975). On the other hand, we believe
that this foundation of vocal behaviors can serve as
the pragmatic basis for more sophisticated natural
language acquisition by the robot.
The system consists of two new drives (the Speech
and Exploration drives), and an architecture of vocal
behaviors shown in Figure 2. The new system is
based on the following components:
• Releasers are global variables which respond
to certain conditions in the environment, as re-
ported by the robot’s perceptual system, or in the
internal state of the robot
|
Emotion |
Behavior |
Proto-linguistic |
|
anger, |
complain |
regulatory |
|
disgust |
withdraw |
instrumental |
|
fear, distress |
escape |
— |
|
calm |
engage |
interactional |
|
joy |
display pleasure |
personal or |
|
sorrow |
display sorrow |
regulatory |
|
surprise |
startle response |
— |
|
boredom |
seek |
— |
Table 1: Correspondence between Kismet’s nonverbal be-
haviors and proto-linguistic functions (Halliday, 1975).
In some fields, - indicates that there is no clear corre-
spondence. In this case, the grunting behaviors may be
active.
• Drives are global ob jects with a changing level
of activation, which regulate the likelihood of ac-
tivation of certain behaviors, and are reset when
these behaviors achieve their goals
• Vocal Behaviors are behavior objects which
consist of receptors, gains, elicitors which be-
have like complex releasers, a level of activation,
a state machine, a vocal label, a measure of
confidence, and output ports for propagation
of their activation and label. Details of a base
behavior are shown in Figure 3.
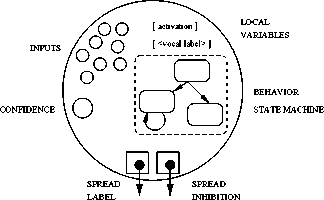
Figure 3: Representation of a single pro-
toverbal behavior.
The design of protoverbal behaviors presented here
fits the description of a behavior as a a self-contained,
self-interested and goal directed entity. All of them
compete to establish which mode of vocal expression
the robot is to engage in, and what phonemic string
it is to produce.
• Self-interest. Each vocal behavior computes its
activation locally and attempts to overwrite its
connections to other behaviors and to the Say
This buffer containing the string that the robot
More intriguing information
1. The English Examining Boards: Their route from independence to government outsourcing agencies2. The Social Context as a Determinant of Teacher Motivational Strategies in Physical Education
3. Workforce or Workfare?
4. Partner Selection Criteria in Strategic Alliances When to Ally with Weak Partners
5. Improvements in medical care and technology and reductions in traffic-related fatalities in Great Britain
6. The name is absent
7. The name is absent
8. The name is absent
9. Cross-Country Evidence on the Link between the Level of Infrastructure and Capital Inflows
10. Gerontocracy in Motion? – European Cross-Country Evidence on the Labor Market Consequences of Population Ageing