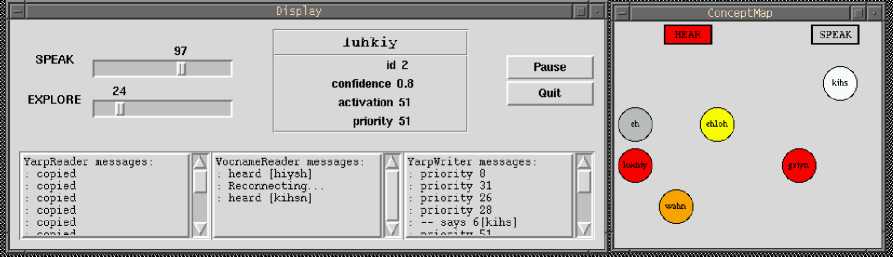
Figure 8: Partial screenshot of an interaction. ConceptMap on the right shows current protoverbal behaviors
colored by their priority value. Details of winning behavior also in the main window.
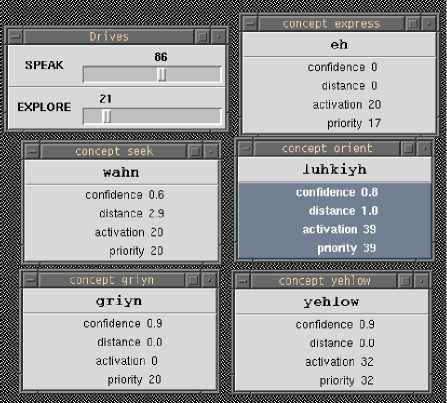
Figure 9: Partial screenshot of an interaction. Highlighted
concept won the priority competition.“orient”, “seek” and
“express” are fixed concepts mirroring the activaiton of
the robot’s nonverbal behaviors. “yehlow” and “griyn”
are new concepts created by the system.
focused on it. Then the toy is removed and only
shown again if the robot shows a seeking behavior
and vocalizes a “request” which sounds similar to
the color label. The words used were transcribed
as strings of phonemes for ViaVoice. Figures 9 and
8 show that the concepts with corresponding labels
were created. However, we do not at present have
a satisfactory evaluation method that would demon-
strate that the labels correspond precisely to that
perceptual category.
7. Discussion
The scope of the project was to provide a frame-
work and a pragmatic, behavior-based approach to
the problem of early concept and vocal label acqui-
sition. Therefore, emphasis was placed on the archi-
tecture of the system rather than on the learning al-
gorithms involved. Consequently, the methods used
are often meant as placeholders for more sophisti-
cated models.
Nevertheless, the preliminary results show that
this approach may be fruitful. We have created a
system of protoverbal behaviors, which operate for
a purpose, namely the satisfaction of the robot’s
drives, including a drive for communication. The
framework allows the “words” in the robot’s pro-
tolanguage to have grounded function and meaning.
Currently we are focusing on developing ap-
propriate evaluation methods to test the system.
Future research will also involve integration of
better phoneme recognition, through incorpora-
tion of the out-of-vocabulary model reported in
(Varchavskaia et al., 2001), and a mechanism for
word segmentation from spoken utterances. We
should also conduct more experiments, including
those with naive sub jects to test claims of natural-
ness and meaningfulness of interaction.
Acknowledgements
Funds for this project were provided by DARPA as
part of the “Natural Tasking of Robots Based on Hu-
man Interaction Cues” pro ject under contract num-
ber DABT 63-00-C-10102.
References
Bloom, P. (2000). How Children Learn the Meaning
of Words. Cambridge: MIT Press.
Breazeal, C. (2000). Sociable Machines: Expressive
Social Exchange Between Humans and Robots.
PhD thesis, MIT.
Brooks, R. A. (1986). A robust layered control
system for a mobile robot. IEEE Journal of
Robotics and Automation RA-2.
Fitzpatrick, P. (1997). A novel behaviour-based
robot architecture and its application to build-
More intriguing information
1. AN IMPROVED 2D OPTICAL FLOW SENSOR FOR MOTION SEGMENTATION2. Cyclical Changes in Short-Run Earnings Mobility in Canada, 1982-1996
3. The name is absent
4. Disentangling the Sources of Pro-social Behavior in the Workplace: A Field Experiment
5. SOCIOECONOMIC TRENDS CHANGING RURAL AMERICA
6. Second Order Filter Distribution Approximations for Financial Time Series with Extreme Outlier
7. BILL 187 - THE AGRICULTURAL EMPLOYEES PROTECTION ACT: A SPECIAL REPORT
8. TOWARD CULTURAL ONCOLOGY: THE EVOLUTIONARY INFORMATION DYNAMICS OF CANCER
9. The name is absent
10. The name is absent