Provided by Cognitive Sciences ePrint Archive
AN IMPROVED 2D OPTICAL FLOW SENSOR FOR MOTION SEGMENTATION
Alan A. Stocker
Institute of Neuroinformatics
University and ETH Ziirich
Winterthurerstrasse 190
8057 Zurich, Switzerland
ABSTRACT
A functional focal-plane implementation of a 2D optical
flow system is presented that detects an preserves motion
discontinuities. The system is composed of two different
network layers of analog computational units arranged in
a retinotopical order. The units in the first layer (the op-
tical flow network) estimate the local optical flow field in
two visual dimensions, where the strength of their nearest-
neighbor connections determines the amount of motion in-
tegration. Whereas in an earlier implementation [1] the con-
nection strength was set constant in the complete image
space, it is now dynamically and locally controlled by the
second network layer (the motion discontinuities network)
that is recurrently connected to the optical flow network.
The connection strengths in the optical flow network are
modulated such that visual motion integration is ideally only
facilitated within image areas that are likely to represent
common motion sources. Results of an experimental aVLSI
chip illustrate the potential of the approach and its function-
ality under real-world conditions.
1. MOTIVATION
The knowledge of visual motion is valuable for a cogni-
tive description of the environment which is a requisite for
any intelligent behavior. Optical flow is a dense represen-
tation of visual motion. Such a representation naturally
favors an equivalent computational architecture where an
array of identical, retinotopically arranged computational
units processes in parallel the optical flow at each image
location. Successful aVLSI implementations of such archi-
tectures have been reported (see e.g.[2]) that demonstrated
real-time processing performance in extracting optical flow.
Although local visual motion information is sufficient for
many applications, its inherent ambiguity (which is e.g. ex-
pressed as the aperture problem) makes the purely local
This work was supported by the Swiss National Science Foundation
and the Korber Foundation.
(normal) optical flow estimate of these processors unreli-
able and often incorrect.
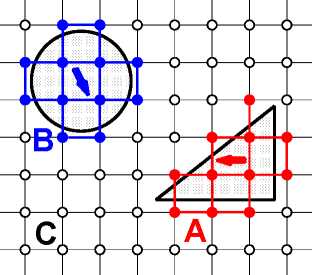
Fig. 1. Different motion sources and their appropriate
regions-of-support. Three different motion sources are in-
duced by two moving objects and the background. The col-
lective computation is ideally restricted to the isolated sets
of processing units A, B (objects) and C (background).
The estimation quality can be increased significantly if
visual motion information is spatially integrated. In [3], a
motion chip that globally integrates and thus performs a col-
lective estimation of visual motion amongst all the units in
the complete image space, is presented. If multiple mo-
tion sources1 are present, however, such a global estimate
becomes meaningless. Earlier, we presented an improved
focal-plane processor that restricts collective computation
to smooth isotropic kernels of variable size, resulting in a
smooth optical flow estimate [1]. Ideally, integration should
be limited to the extents of the individual motion sources.
Such a scheme, as illustrated in Figure 1, provides an opti-
mal optical flow estimate but requires the processing array
to be able to connect and separate groups of units dynam-
ically. Resistive network architectures applying such dy-
namical linking have been proposed before [4]. However, to
our knowledge there exists only one attempt to implement
such an approach [5]. In this one-dimensional processing
1 e.g. a single moving object on a stationary but structured background
0-7803-7448-7/02/$17.00 ©2002 IEEE
II - 332
More intriguing information
1. An Estimated DSGE Model of the Indian Economy.2. REVITALIZING FAMILY FARM AGRICULTURE
3. BUSINESS SUCCESS: WHAT FACTORS REALLY MATTER?
4. The name is absent
5. Evaluation of the Development Potential of Russian Cities
6. Barriers and Limitations in the Development of Industrial Innovation in the Region
7. Correlation Analysis of Financial Contagion: What One Should Know Before Running a Test
8. Making International Human Rights Protection More Effective: A Rational-Choice Approach to the Effectiveness of Ius Standi Provisions
9. The name is absent
10. Volunteering and the Strategic Value of Ignorance