
Figure 9: SAIL robot navigates autonomously using its autonomously developed visual perceptual behaviors. Four
movies are available at http://www.egr.msu.edu/mars/ to provide more results.

Figure 12: The SAIL robot learned the chained action after verbally instructed by human trainers.
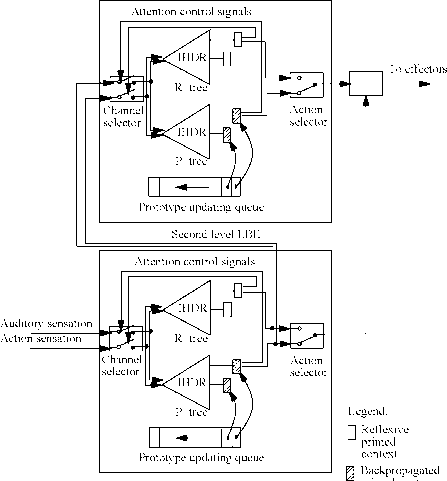
First level LBE primed context
Figure 10: A hierarchical developmental learning archi-
tecture for action chaining.
interacting with human trainers. For more details,
the reader is referred to another paper in the pro-
ceeding of this workshop (Huang and Weng, 2002).
6. Comparison with others’ work
What is the most basic difference between a tradi-
tional learning algorithm and a developmental algo-
rithm? Autonomous development does require a ca-
pability of learning but it requires something more
fundamental. A developmental algorithm must be
(a) (b) (c) (d)
ɔ OS O¾}
(e) (f) (g)
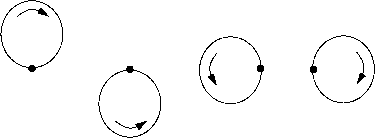
Figure 11: Gripper tip trajectories of the SAIL robot.
(a)-(d) are basic actions, each of which starts from the
black dot. (e)-(g) are composite actions chaining some
or all of the basic ones.
able to learn tasks that its programmers do not
know or even cannot predict. This is because a de-
velopmental algorithm, once designed before robot
“birth,” must be able to learn new tasks and new
skills without requiring re-programming. The rep-
resentation of a traditional learning algorithm is de-
signed by humans for a given task but that for a de-
velopmental algorithm must be autonomously gener-
ated. As a working example, humans’ developmental
algorithm enables humans to learn new skills without
a need to change the design of their brain.
However, the motive of developmental robots is
not to make robot more difficult to program, but rel-
More intriguing information
1. Improving the Impact of Market Reform on Agricultural Productivity in Africa: How Institutional Design Makes a Difference2. How do investors' expectations drive asset prices?
3. The name is absent
4. The name is absent
5. The name is absent
6. The name is absent
7. The name is absent
8. The Effects of Reforming the Chinese Dual-Track Price System
9. Modelling Transport in an Interregional General Equilibrium Model with Externalities
10. The resources and strategies that 10-11 year old boys use to construct masculinities in the school setting