A Unified Model For Developmental Robotics
Williams Paquier, Nicolas Do Huu, Raja Chatila
LAAS/CNRS, 7 avenue du Colonel Roche, F-31077 Toulouse Cedex 04, France
[email protected], [email protected], [email protected]
Abstract
We present the architecture and distributed
algorithms of an implemented system called
NeuSter, that unifies learning, perception and ac-
tion for autonomous robot control. NeuSter com-
prises several sub-systems that provide online
learning for networks of million neurons on ma-
chine clusters. It extracts information from sen-
sors, builds its own representations of the envi-
ronment in order to learn non-predefined goals.
1. A need for a common framework
Several approaches and models propose developmen-
tal robot properties (Tijsseling and Berthouze, 2001,
MacDorman et al., 2001). From a robotics point of view,
all these properties should be implemented in a single
system and the question of system integration must be ad-
dressed. We propose a multi-scale and distributed model
which permits to address online perception, representa-
tion, goal learning, and skill acquisition. With this sys-
tem, the robot acquires new capabilities by building new
representations, starting from a very elementary prede-
fined set, and by synthezising new actions (or skills) also
using a very limited elementary set as a starting vocabu-
lary. Learning and adaptation rely on an exploration pro-
cess that enables to build and reinforce the representa-
tions and actions. These actions are the more rewarding
in achieving the system’s goals, which are also incremen-
tally learned. No predefined structures are given to the
system - except its general neural architecture. The clas-
sical symbol grounding problem (Harnad, 1990) is thus
addressed.
System architecture is described in the next section,
and an example of operation in section 3.
2. System Architecture
The global system has two main properties : a) the first is
extraction of representations from the environment, and
b) the second is action chaining to obtain the representa-
tions which produce the best global effect. The system is
composed of seven functional subsystems as depicted in
Figure 1 (Paquier and Chatila, 2002).
The system is structured in slices of connected
Pulsed Neural Networks (PNN) based on a discrete in-
tegrate and fire model. PNN provide a level of de-
scription that allows to develop the learning process
(Gerstner and Kistler, 2002), categorization and associ-
ation, while avoiding combinatorial explosion. Within
each slice’s thickness, six neurons are connected to form
a column which is the basic element of the system. The
first three neurons of a column are responsible for infor-
mation extraction and competition in the input stream, the
fourth neuron is responsible for the persistence of detec-
tion and is the input to the next slices. The last two neu-
rons are responsible for the scoring process and its diffu-
sion in the global system.
,'У\
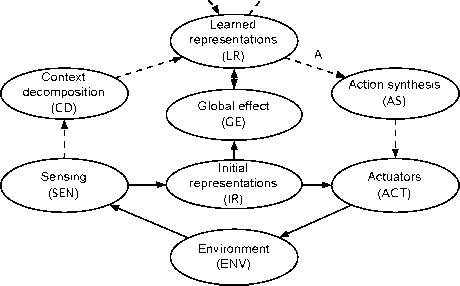
Figure 1: Global system and sensory-motor loops. Plain ar-
rows are hard-coded pathways and dotted arrows correspond to
learned pathways.
The functions of the seven subsystems are as follows:
• Sensing (SEN) is the input of the global system
and is the frontier between the environment and the neu-
ral space. It is composed of maps of converter neu-
rons between physical value and computable information
wherein the potential values are static and dynamic “im-
ages” of the stimuli.
• Initial Representations (IR) is a neuronal structure
which is the initial set of representation goals. Each neu-
ron in IR can be activated by SEN, and the result of this
activation has a predefined effect on the criteria satisfac-
tion (see GE next). IR can be considered as the initial
position in the representation/score space. The system
behaviour will grow from this point.
• Context Decomposition (CD) can be defined as the
categorization engine. It extracts all the high-level fea-
tures that could be used to describe the environment. It is
More intriguing information
1. An alternative way to model merit good arguments2. Word searches: on the use of verbal and non-verbal resources during classroom talk
3. Lending to Agribusinesses in Zambia
4. APPLICATIONS OF DUALITY THEORY TO AGRICULTURE
5. New urban settlements in Belarus: some trends and changes
6. Antidote Stocking at Hospitals in North Palestine
7. Human Development and Regional Disparities in Iran:A Policy Model
8. The name is absent
9. Imitation in location choice
10. Gerontocracy in Motion? – European Cross-Country Evidence on the Labor Market Consequences of Population Ageing