composed of a multilayer network of maps in a pyrami-
dal structure. The layers of CD build representations by
detecting regularities in the preceeding ones.
• Learned Representations (LR) receives inputs
from CD and itself. This sub-system has the properties
of an associative memory. It is responsible for learn-
ing of new skills and determines the global system be-
haviour. Each neuron of LR is connected to GE for cri-
teria evaluation. We define representations as the set of
active columns in LR at time t.
• Elementary Actions and Action Synthesis (AS
and ACT) are the action sub-systems. AS produces com-
binations of elementary actions. Its outputs are connected
to ACT. ACT is the interface between the neuron/pulse
space and the environment. It is a one-layer set of maps
where each map drives a degree of freedom of the effec-
tors in a multi-scale way.
• Global Effects (GE) is a scoring system which as-
sociates a value with each representation. We call effects
the score obtained through a representation. GE repre-
sents the criterion the system wants to maximize. When
the effects of a representation are negative the system will
produce actions to increase the criterion value.
3. Developmental properties
The system is able to detect spatial and temporal invari-
ants, and to produce new actions. We will provide here an
example of detection of spatial invariants. Patterns are ex-
tracted from images and grouped in classes according to
an invariance criterion - which will be related to shapes in
the environment. SEN neuron potentials are composed of
images of projections of these shapes. CD extracts what
is common or different among the features that compose
them.
Figure 2 shows a simple result where 3 distinct objects
are presented to the system. After decomposing the im-
age into elementary features, three LR maps are learned
to detect and localize each particular object. This exam-
ple only uses the spatial competition property. The im-
ages of potentials are decomposed by applying groups
of competitive filters systematically and simultaneously
on each part of the images. The layered architecture of
CD permits to repeat this process across the structure so
that the neurons at the top of CD correspond to a recep-
tive field as large as the whole image. At this level of
representation, input images have been diffracted in the
sub-system, decomposed in spatial frequencies and pat-
tern contents, and recomposed in more complex struc-
tures. This ”decomposition and recomposition” evolves
across time and converges toward a stable state. All the
learned weight kernels are based on the image frequen-
cies and feature contents. The activity of the high end
neurons of CD provides this distributed representation of
the environment.
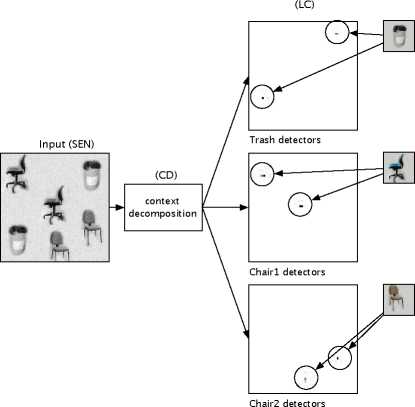
Figure 2: Simple example of spatial competition among neu-
rons of different maps of the same layer. In LR layer, burst
state are represented by grey level. White means no discharge.
The system is able to discriminate and localize the two kinds
of chairs and the trash bin from 128x128 input image. In this
example, the system includes 20 480 neurons and 13 922 304
synapses. The extraction stability is obtained after 500 time
steps (less than a minute on SunBlade 100 workstation) while
recognition duration is much smaller (about 12Hz in the same
conditions).
4. Conclusion
Implementation of this architecture is in progress and first
experiments are underway with a Nomadics XR 4000 and
a six-legged robots for the elaboration of new behaviors.
References
Gerstner, W. and Kistler, W. (2002). Mathematical for-
mulations of hebbian learning. Biological Cybernet-
ics, 87:404-415.
Harnad, S. (1990). The symbol grounding problem.
Physica D, 42:335-346.
MacDorman, K. F., Tatani, K., Miyazaki, Y., and Koeda,
M. (2001). Proto-symbol emergence. In Interna-
tional Conference on Robotics and Automation, vol-
ume 2, pages 1968-1974.
Paquier, W. and Chatila, R. (2002). An architecture for
robot learning. In Intelligent Autonomous Systems,
pages 575-578.
Tijsseling, A. and Berthouze, L. (2001). A neural
network for temporal sequential information. In
Proceedings of the 8th International Conference on
Neural Information Processing, Shanghai (China),
pages 14-18.
More intriguing information
1. A Rational Analysis of Alternating Search and Reflection Strategies in Problem Solving2. The name is absent
3. The name is absent
4. The name is absent
5. A methodological approach in order to support decision-makers when defining Mobility and Transportation Politics
6. The name is absent
7. The name is absent
8. The name is absent
9. PER UNIT COSTS TO OWN AND OPERATE FARM MACHINERY
10. Multimedia as a Cognitive Tool