CHAPTER 4. CODING PROCESS
15
TLCantraller
÷fir∣f r a: Infrastructure
≠t∣d :TLDecision[][]
-TrackNcciejnt
≠r∣um..tlsιint
+g at I nf rast ru ct иге Й і nf rast ru ct u re
+setinfrastructure (inf ra Infrastructure): void
+decide TLi Q: TLDDeaa >ontf U
+create DecisionArray (inf ra:lnfrastructure):TLDecision[][]
#get QVqIuesFrom DecisionArray (array :TLDDecision[][]):float[][]
+applyQValues(array.TLDecision[][],value:float[][]):void
+reset θ:voi d
+trackNode(i:int):void
+getNumTLs():int
+LipdateRoadLaer Move(r Lt:'fi.o adιaer, pre γfs ле: Drivelsrte,...:.. .):va'd
+UoSettingsD ialog(c: Controller, sett IngsiTLCSet tings): void
TlCSettings
-descriptions:Stringi]
-ints:i nt[ ]
- float s:fieat[ ]
+TLCSet tings(Je script ions: St ri π g[ ɪ, і nt s: int [ɪ, f Ioat s:f Ioat [ J):
Created with Poseidon for LiML Community Edition. Not for Commercial Use.
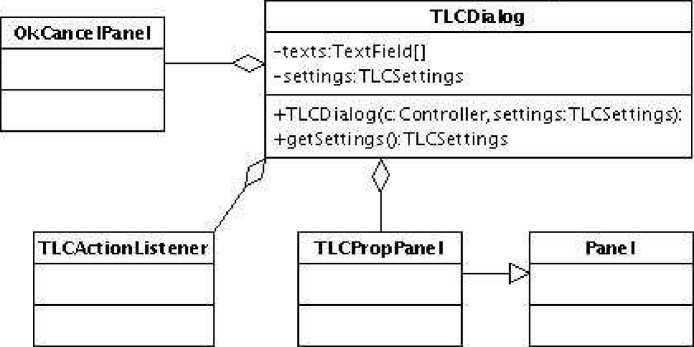
Figure 4.3: UML diagram: TLController
More intriguing information
1. Implementation of a 3GPP LTE Turbo Decoder Accelerator on GPU2. Database Search Strategies for Proteomic Data Sets Generated by Electron Capture Dissociation Mass Spectrometry
3. The name is absent
4. ASSESSMENT OF MARKET RISK IN HOG PRODUCTION USING VALUE-AT-RISK AND EXTREME VALUE THEORY
5. Økonomisk teorihistorie - Overflødig information eller brugbar ballast?
6. Creating a 2000 IES-LFS Database in Stata
7. Economies of Size for Conventional Tillage and No-till Wheat Production
8. Higher education funding reforms in England: the distributional effects and the shifting balance of costs
9. ENERGY-RELATED INPUT DEMAND BY CROP PRODUCERS
10. An Economic Analysis of Fresh Fruit and Vegetable Consumption: Implications for Overweight and Obesity among Higher- and Lower-Income Consumers