64
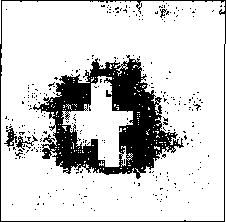

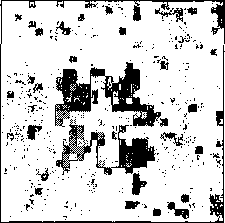
(a) μ = 1 (b) μ = 5 (c) μ = 10
Figure A.l : Test FTVd reconstruction results of the Chinese character “light” for
the single-pixel CS imaging system for various μ and a maximum β of 1024. A smaller
μ yields a smoother image while a larger μ gives a sharper but noisier image.
rr-subproblem with the fast Fourier transform, applicable only when Φ is a Toeplitz
matrix. Since the measurement matrix Φ used in the single-pixel imaging system is
random, my implementation uses the matrix left division in Matlab to solve the x-
Subproblem. This implementation can be slow, but works for the small-size problem
in this thesis. The TVAL3 algorithm should be an faster alternative for solving the
reconstruction problem in (A.l) for general matrix Φ and even for complex data [73].
A quick note on choosing the optimization parameters, μ and β: The regulariza-
tion parameter μ controls the weights between the smoothness (min-TV) assumption
and the measured data used for the reconstruction. A smaller μ yields a smoother
image while a larger μ usually gives a sharper but noisier image because the mea-
sured data is noisy (see Figure A.l). The FTVd algorithm uses a continuation for
β (gradually increasing with the number of iterations), so it only requires an upper
limit for β. For the test results used in this thesis, typical values for μ is between 1
and 10, whereas beta should be powers of 2, between 256 and 1024.
More intriguing information
1. Micro-strategies of Contextualization Cross-national Transfer of Socially Responsible Investment2. The name is absent
3. The name is absent
4. The name is absent
5. Cardiac Arrhythmia and Geomagnetic Activity
6. An Investigation of transience upon mothers of primary-aged children and their school
7. A Note on Costly Sequential Search and Oligopoly Pricing (new title: Truly Costly Sequential Search and Oligopolistic Pricing,)
8. Multiple Arrhythmogenic Substrate for Tachycardia in a
9. DISCUSSION: ASSESSING STRUCTURAL CHANGE IN THE DEMAND FOR FOOD COMMODITIES
10. APPLYING BIOSOLIDS: ISSUES FOR VIRGINIA AGRICULTURE