J.Q. Smith and Antonio Santos
ple, in the second sub-sample we compared the density f (α852∖y 1,... ,y852,θ) with
f (α852∖y 1,... ,y1000,θ), which we might have expected to be close. The difference
between the filter distribution obtained using the first order particle filter was enor-
mous in comparison with the smoothing distribution. The same did not occur with
the second order particle filter, which is a clear indication of the feasibility of the
procedures presented in this paper.
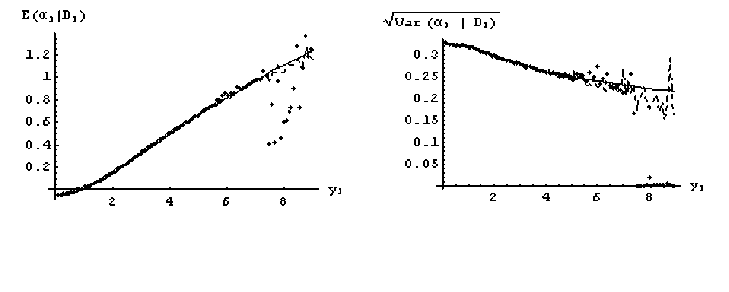
Figure 4: Comparison of particle filter procedures using the first and second order ap-
proximation to the log-likelihood function in a SV model. Left: mean evolution; Right:
standard deviation evolution; exact path (solid line); first order (dotted line); second order
(dashed line).
To better understand the infeasibility of using the first order APF to forecast the
variance evolution associated with stock returns within a standard SV model, we
present here a simple simulation that highlights the problems associated with the
existence of outliers. We illustrate these problems applied to update the distribution
of the first state, α1 , in a standard SV model. It is supposed that α0 follows a
Gaussian distribution with mean m0 and variance C0 . In the univariate model, the
updated distribution of α1∖D1, up to a normalizing constant c, has a known form
G.E.M.F - F.E.U.C.
18
More intriguing information
1. Cyclical Changes in Short-Run Earnings Mobility in Canada, 1982-19962. A Note on Costly Sequential Search and Oligopoly Pricing (new title: Truly Costly Sequential Search and Oligopolistic Pricing,)
3. THE USE OF EXTRANEOUS INFORMATION IN THE DEVELOPMENT OF A POLICY SIMULATION MODEL
4. Agricultural Policy as a Social Engineering Tool
5. AGRIBUSINESS EXECUTIVE EDUCATION AND KNOWLEDGE EXCHANGE: NEW MECHANISMS OF KNOWLEDGE MANAGEMENT INVOLVING THE UNIVERSITY, PRIVATE FIRM STAKEHOLDERS AND PUBLIC SECTOR
6. Crime as a Social Cost of Poverty and Inequality: A Review Focusing on Developing Countries
7. The name is absent
8. Feeling Good about Giving: The Benefits (and Costs) of Self-Interested Charitable Behavior
9. APPLYING BIOSOLIDS: ISSUES FOR VIRGINIA AGRICULTURE
10. The name is absent