How does an infant acquire the ability of
joint attention?: A Constructive Approach
Yukie Nagai* Koh Hosoda*t Minoru Asada*t
* Dept. of Adaptive Machine Systems,
tHANDAI Frontier Research Center,
Graduate School of Engineering, Osaka University
2-1 Yamadaoka, Suita, Osaka, 565-0871 Japan
[email protected], {hosoda, asada}@ams.eng.osaka-u.ac.jp
Abstract
This study argues how a human infant ac-
quires the ability of joint attention through
interactions with its caregiver from the view-
point of a constructive approach. This pa-
per presents a constructive model by which a
robot acquires a sensorimotor coordination for
joint attention based on visual attention and
learning with self-evaluation. Since visual at-
tention does not always correspond to joint at-
tention, the robot may have incorrect learning
situations for joint attention as well as correct
ones. However, the robot is expected to sta-
tistically lose the data of the incorrect ones
as outliers through the learning, and conse-
quently acquires the appropriate sensorimo-
tor coordination for joint attention even if the
environment is not controlled nor the care-
giver provides any task evaluation. The ex-
perimental results suggest that the proposed
model could explain the developmental mech-
anism of the infant’s joint attention because
the learning process of the robot’s joint at-
tention can be regarded as equivalent to the
developmental process of the infant’s one.
1. Introduction
A human infant acquires various and complicated
cognitive functions through interactions with its en-
vironment during the first few years. However,
the cognitive developmental process of the infant is
not completely revealed. A number of researchers
(Bremner, 1994, Elman et al., 1996, Johnson, 1997)
in cognitive science and neuroscience have attempted
to understand the infant’s development. Their be-
havioral approaches have explained the phenomena
of the infant’s development, however its mechanisms
are not clear. In contrast, constructive approaches
have potential to reveal the cognitive developmental
mechanisms of the infant. It is suggested in robotics
that the building of a human-like intelligent robot
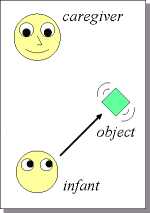
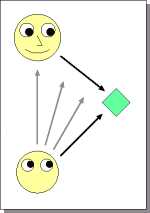
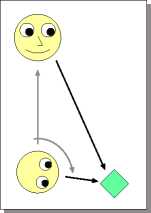
(a) 6th month (b) 12th month (c) 18th month
Figure 1: Development of infant’s joint attention
based on the insight of the infant could lead us to the
understanding of the mechanisms of the infant’s de-
velopment (Brooks et al., 1998, Asada et al., 2001).
Joint attention with a caregiver is one of the
abilities that help the infant to develop its so-
cial cognitive functions (Scaife and Bruner, 1975,
Moore and Dunham, 1995). It is defined as a pro-
cess that the infant attends to an object which the
caregiver attends to. Owing to the ability of joint
attention, the infant learns other kinds of social func-
tions, e.g. language communication, mind reading
(Baron-Cohen, 1995), and so on. On the basis of the
insight, robotics researchers have attempted to build
the mechanisms of joint attention for their robots
(Breazeal and Scassellati, 2000, Scassellati, 2002,
Kozima and Yano, 2001, Imai et al., 2001). How-
ever, their mechanisms of joint attention were
fully-developed by the designers in advance, and it
was not argued how the robot can acquire such an
ability of joint attention through interactions with
its environment.
Butterworth and Jarrett (1991) suggested that the
infant develops the ability of joint attention in three
stages: ecological, geometric, and representational
stages. In the first stage, the infant at the 6th month
has a tendency to attend to an interesting object in
More intriguing information
1. An Empirical Analysis of the Curvature Factor of the Term Structure of Interest Rates2. XML PUBLISHING SOLUTIONS FOR A COMPANY
3. Climate change, mitigation and adaptation: the case of the Murray–Darling Basin in Australia
4. Quality Enhancement for E-Learning Courses: The Role of Student Feedback
5. Opciones de política económica en el Perú 2011-2015
6. The name is absent
7. Auctions in an outcome-based payment scheme to reward ecological services in agriculture – Conception, implementation and results
8. INSTITUTIONS AND PRICE TRANSMISSION IN THE VIETNAMESE HOG MARKET
9. AGRICULTURAL TRADE LIBERALIZATION UNDER NAFTA: REPORTING ON THE REPORT CARD
10. The name is absent