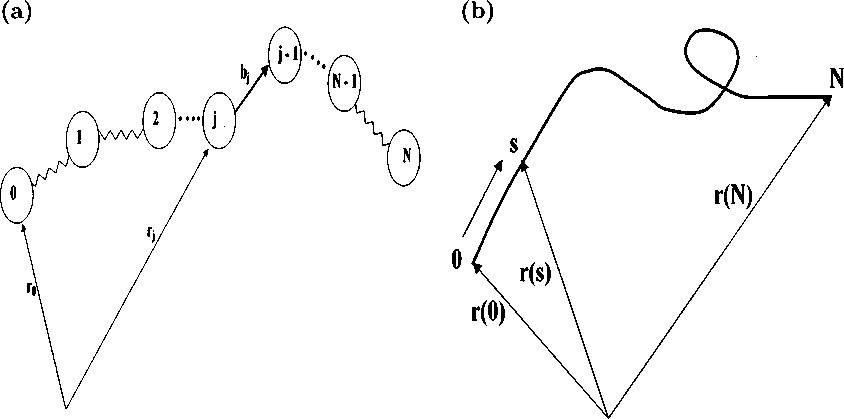
Figure 8.1: (a) Schematic of the coarse-grained discrete Gaussian chain model with N+l
segments and N springs. The segment positions are denoted by rɑ, rɪ, ..., rjy, and the bond
vectors are denoted by bɪ, b2, ..., bjy. (b) Schematic of the continuous Gaussian chain
model. The configurations of the polymer chain are described by the r (s), where s ∈ [0, N]
is a contour parameter.
The partition function of a single chain can be expressed as
Z0 = / drw+1exp [-∕3f∕0(r'v+1)] , (8.1)
where r'v+1 = (r0, rɪ, ..., r^) denotes the set of N + 1 segment positions and Uo(rw+1)
is the potential energy associated with the particular configuration of the polymer
chain. An alternative representation is the set of N bond vectors, bv = (bɪ, b2, ...,
bjv), where bi = ri - ri-ι.
Z0=Vl dbN exp [—∕5l7o(byv)] ,
209
(8.2)
More intriguing information
1. The name is absent2. La mobilité de la main-d'œuvre en Europe : le rôle des caractéristiques individuelles et de l'hétérogénéité entre pays
3. Voluntary Teaming and Effort
4. The Making of Cultural Policy: A European Perspective
5. Rent Dissipation in Chartered Recreational Fishing: Inside the Black Box
6. The name is absent
7. Voting by Committees under Constraints
8. Skill and work experience in the European knowledge economy
9. he Virtual Playground: an Educational Virtual Reality Environment for Evaluating Interactivity and Conceptual Learning
10. The name is absent