-5
Unemployment Rate
0.15
0.1
0.05
0
-0.05
-0.1
-0.15
-0.2
0246
Short-term Unemployment
0
0246
Years
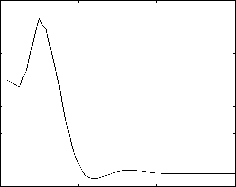
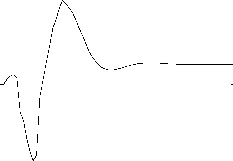
λ
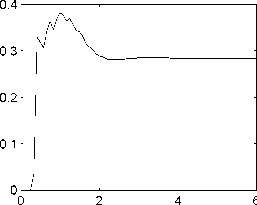
Long-term Unemployment
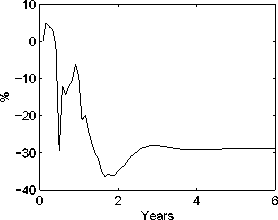
Fig. 3. Model Based Predictive Control. (% deviation from baseline, except λ).
3.3 Model Based Predictive Control
Model based predictive control (MBPC) is a suite of control methods where a
linear model is used to predict the future output of the full nonlinear model;
and the control rule is developed from the prediction is applied to the full non-
linear model. As with the linear-quadratic approach, the control is developed
dynamically (at each time-step) and is applied to the full nonlinear model at
the same time-step; but unlike the linear-quadratic approach the linear model
is regenerated dynamically as part of the control rule generation. Details of the
methods can be found in Rossiter (2003) and we use the approach developed
in Herbert and Bell (2004).
The MBPC approach attempts to overcome the accuracy of the linear model
in the linear-quadratic method by using a time-varying linear model. In the
results here, we also add a learning component so the linear model adjusts
according to its difference in predicted output from the nonlinear model (Her-
bert, 1998).
The MBPC approach also allows for explicit constraints to be added in the
control rule generation. The constraints can be placed on the level and rate of
change of the output as well as the control. Such constraints are much more
realistic with labor market models where there are plausible policy strategies
and un-modelled components.
MBPC is more complex mathematically than the linear-quadratic approach.
More intriguing information
1. ISSUES AND PROBLEMS OF IMMEDIATE CONCERN2. Death as a Fateful Moment? The Reflexive Individual and Scottish Funeral Practices
3. The name is absent
4. EXECUTIVE SUMMARIES
5. A Regional Core, Adjacent, Periphery Model for National Economic Geography Analysis
6. The name is absent
7. Regional dynamics in mountain areas and the need for integrated policies
8. The name is absent
9. Wounds and reinscriptions: schools, sexualities and performative subjects
10. The Role of area-yield crop insurance program face to the Mid-term Review of Common Agricultural Policy