-0.15
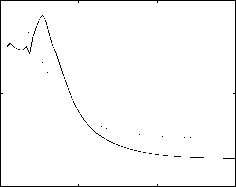
Unemployment Rate
0.05
0
-0.05
-0.1
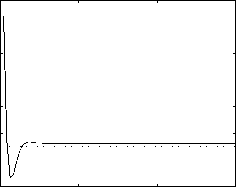
λ
1200
1000
800
600
400
200
0
-200
0246
0246
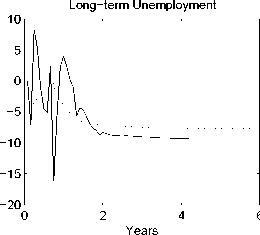
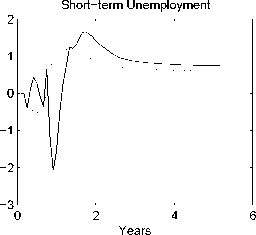
Fig. 2. Linear Model Based Control. (% deviation from baseline, except λ. Dashed
Line is the Response from Figure 1.)
use weights of unity. This is a conventional quadratic output tracking objective
(social loss) function.
3.2 Linear Model
For the linear model based control method we use the standard linear-quadratic
output tracking approach (Herbert, 1998) with a linear model derived from the
full nonlinear model. The linear model is numerically estimated by perturbing
the input to the full nonlinear model.
The advantage of the linear-quadratic approach is that the optimization can
be analytically solved, and the solution programmed. The control policy is
developed from the linear model dynamically at each time step. We apply this
control to the full nonlinear model.
The disadvantage of this method is that it is dependant upon the accuracy of
linear model and that constraints on the control cannot be included explicitly
as part of the control generation procedure. In the literature the usual ap-
proach of implementing constraints is to varying the relative weights between
the output and control tracking errors in the objective function.
More intriguing information
1. The name is absent2. Dual Inflation Under the Currency Board: The Challenges of Bulgarian EU Accession
3. Testing Gribat´s Law Across Regions. Evidence from Spain.
4. Strategic Policy Options to Improve Irrigation Water Allocation Efficiency: Analysis on Egypt and Morocco
5. Firm Creation, Firm Evolution and Clusters in Chile’s Dynamic Wine Sector: Evidence from the Colchagua and Casablanca Regions
6. Epistemology and conceptual resources for the development of learning technologies
7. Valuing Farm Financial Information
8. The name is absent
9. The name is absent
10. Getting the practical teaching element right: A guide for literacy, numeracy and ESOL teacher educators