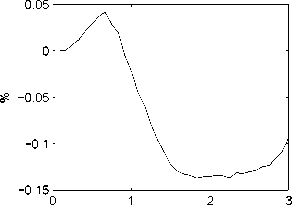
Unemployment Rate
4
3
2
1
0
-1
-2
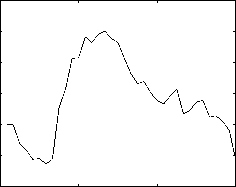
Short-term Unemployment
0123
Years
-15
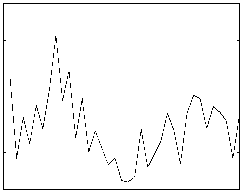
Long-term Unemployment
10
5
0
-5
-10
1
2
3
0
Years
Fig. 4. Nonlinear Optimization. (% deviation from baseline, except λ).
The MBPC algorithm results in a quadratic programming problem.
3.4 Nonlinear Optimization
The nonlinear optimization approach uses the full nonlinear model and stacks
it up over time. The model effectively becomes a static model for the entire
time horizon rather than a dynamic model which is solved one time-period
after another. The same variable at a different time-period is treated as a
different variable so that the number of equations in the original model is
multiplied by the number of time-steps in the time horizon resulting in a
much larger model. The resulting stacked model is solved once. To determine
the optimal control, the objective function is stacked over the time horizon. A
nonlinear optimization algorithm is then used to minimize the stacked objec-
tive function against the stacked model.
The advantage in this approach is that it is more general with constraints or
other requirements simply included in the code that implements the objective
function. The objective function need not be quadratic.
Another advantage with the nonlinear optimization approach is that the is
a single optimization, and the entire trajectory for the output and control is
found in the single optimization.
The disadvantage is that it is a large optimization problem that generally
More intriguing information
1. The name is absent2. Disentangling the Sources of Pro-social Behavior in the Workplace: A Field Experiment
3. Constructing the Phylomemetic Tree Case of Study: Indonesian Tradition-Inspired Buildings
4. Does Competition Increase Economic Efficiency in Swedish County Councils?
5. The name is absent
6. The value-added of primary schools: what is it really measuring?
7. Pass-through of external shocks along the pricing chain: A panel estimation approach for the euro area
8. The name is absent
9. The name is absent
10. THE WELFARE EFFECTS OF CONSUMING A CANCER PREVENTION DIET