1
0.5
0
-0.5
-1

-1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8
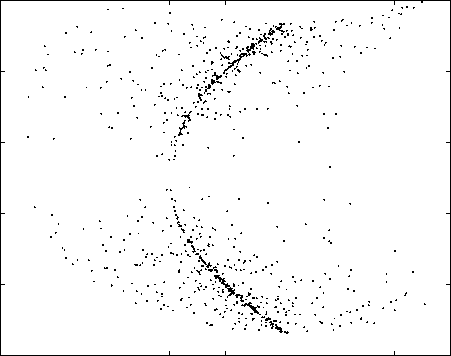
Fig. 4. Separation performed by the MLP-based network.
0.1
0.08
0.06
0.04
0.02
0
-0.02
-0.04
-0.06
-0.08
-0.1
-0.06 -0.04 -0.02 0 0.02 0.04 0.06 0.08 0.1
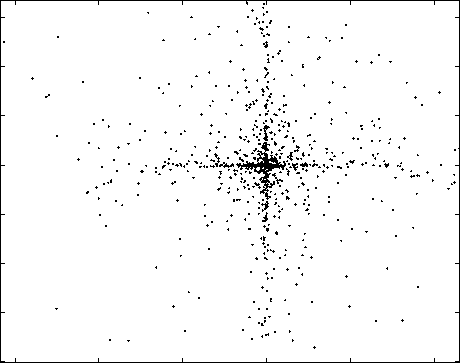
Fig. 6. Mixture of a supergaussian and a subgaussian source.
1.5
1
0.5
0
-0.5
-1
-1.5
-1.5
-1
-0.5
0.5
Fig. 5. Separation performed by the RBF-based network.
1
-1
-1.5
-0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6
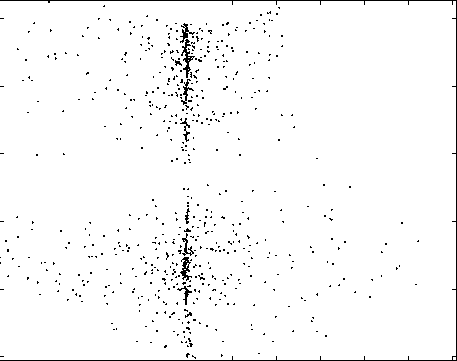
Fig. 7. Separation performed by the MLP-based network.
slow training of MLP-based nonlinear ICA systems is the
nonlocal character of these networks.
Figure 9 shows an example of an ICA result obtained
with the RBF-based network, in the case of the mixture of
two supergaussians, but without weight decay. While a rel-
atively good ICA result was achieved (the estimated mutual
information is the same as in Figs. 4 and 5), the original
sources were not separated. This shows the importance of
using regularization with networks of this kind.
5. CONCLUSIONS
We have briefly presented the MISEP, a method for linear
and nonlinear ICA, which is an extension of the well known
INFOMAX method. We discussed a possible cause for the
relatively slow learning that it sometimes shows, having
conjectured that it was due to the use of non-local units in
the network that performs the ICA operation.
This conjecture was confirmed by experimental tests, in
which a system based on a radial basis function network was
compared to one based on a multilayer perceptron on the
same nonlinear ICA problems. These tests confirmed that
that system based on RBF units learns significantly faster,
and shows a lower variability of the training times. The tests
also showed, however, that the RBF-based system needs to
have explicit regularization to be able to perform nonlin-
ear source separation, contrary to what happened with the
MLP-based one.
More intriguing information
1. On Dictatorship, Economic Development and Stability2. Competition In or For the Field: Which is Better
3. Qualifying Recital: Lisa Carol Hardaway, flute
4. The Composition of Government Spending and the Real Exchange Rate
5. Kharaj and land proprietary right in the sixteenth century: An example of law and economics
6. The name is absent
7. Public-Private Partnerships in Urban Development in the United States
8. Change in firm population and spatial variations: The case of Turkey
9. The name is absent
10. The name is absent